ekfSLAM
Realice localización y mapeo simultáneos utilizando el filtro Kalman extendido
Desde R2021b
Descripción
El objeto ekfSLAM realiza localización y mapeo simultáneos (SLAM) utilizando un filtro Kalman extendido (EKF). Toma puntos de referencia observados en el entorno y los compara con puntos de referencia conocidos para encontrar asociaciones y nuevos puntos de referencia. Utilice las asociaciones para corregir el estado y la covarianza del estado. Los nuevos puntos de referencia se aumentan en el vector estatal.
Creación
Sintaxis
Descripción
slamObj = ekfSLAM
slamObj = ekfSLAM(Name,Value)
slamObj = ekfSLAM('MaxNumLandmark',N,Name,Value)N permitidos en el vector de estado al generar código. Este límite en la cantidad de puntos de referencia se aplica solo al generar código.
slamObj = ekfSLAM('MaxNumLandmark',N,‘MaxNumPoseStored’,M,Name,Value)M junto con la cantidad máxima de puntos de referencia N en el vector de estado mientras se genera el código. Estos límites se aplican solo al generar código.
Propiedades
Funciones del objeto
copy | Crear una copia profunda del objeto EKF SLAM |
correct | Covarianza de estado correcto y error de estado |
landmarkInfo | Recuperar información de puntos de referencia |
poseHistory | Recuperar el historial de poses corregido y previsto |
predict | Predecir la covarianza de estado y error de estado |
removeLandmark | Eliminar punto de referencia del vector de estado |
reset | Restablecer la covarianza del error de estimación del estado y del estado |
Ejemplos
Cargue un conjunto de datos de pista de carreras que contenga el estado inicial del vehículo, la covarianza del estado inicial del vehículo, la covarianza del ruido del proceso, la entrada de control, el tamaño del paso de tiempo, la medición, la covarianza de la medición y los valores de la puerta de validación.
load("racetrackDataset.mat","initialState","initialStateCovariance", ... "processNoise","controllerInputs","timeStep", ... "measurements","measCovar","validationGate");
Cree un objeto ekfSLAM con estado inicial, covarianza de estado inicial y ruido de proceso.
ekfSlamObj = ekfSLAM("State",initialState, ... "StateCovariance",initialStateCovariance, ... "ProcessNoise",processNoise);
Inicializa una variable para almacenar la pose.
storedPose = nan(size(controllerInputs,1)+1,3); storedPose(1,:) = ekfSlamObj.State(1:3);
Prediga el estado utilizando la entrada de control y el tamaño del paso de tiempo para la función de transición de estado. Luego, corrija el estado utilizando los datos de los puntos de referencia observados, la covarianza de medición y la puerta de validación para la función de asociación de datos.
for count = 1:size(controllerInputs,1) % Predict the state predict(ekfSlamObj,controllerInputs(count,:),timeStep); % Get the landmarks in the environment observedLandmarks = measurements{count}; % Correct the state if ~isempty(observedLandmarks) correct(ekfSlamObj,observedLandmarks, ... measCovar,validationGate); end % Log the estimated pose storedPose(count+1,:) = ekfSlamObj.State(1:3); end
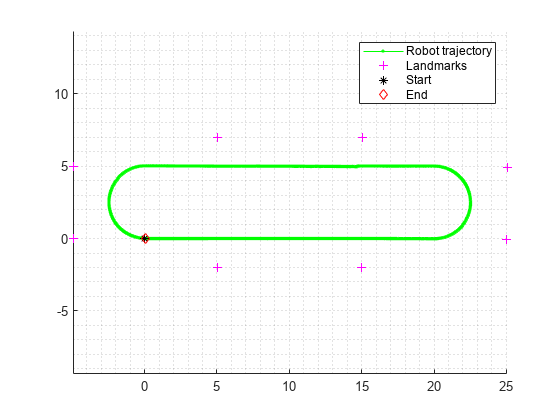
Visualice el mapa creado.
fig = figure; figAx = axes(fig); axis equal grid minor hold on plot(figAx,storedPose(:,1),storedPose(:,2),"g.-") landmarks = reshape(ekfSlamObj.State(4:end),2,[])'; plot(figAx,landmarks(:,1),landmarks(:,2),"m+") plot(figAx,storedPose(1,1),storedPose(1,2),"k*") plot(figAx,storedPose(end,1),storedPose(end,2),"rd") legend("Robot trajectory","Landmarks","Start","End")
Capacidades ampliadas
Historial de versiones
Introducido en R2021b
Consulte también
Objetos
Funciones
copy|correct|landmarkInfo|poseHistory|predict|removeLandmark|reset