removeLoopClosures
Eliminar cierres de bucle del gráfico de pose
Descripción
Ejemplos
Cargue datos de escaneo láser desde un archivo.
load("offlineSlamData.mat");Para configurar el algoritmo SLAM:
Especifique el rango lidar, la resolución del mapa, el umbral de cierre del bucle y el radio de búsqueda.
Ajuste estos parámetros para su robot y entorno específicos.
Crea el objeto
lidarSLAMcon estos parámetros.
maxLidarRange = 8; mapResolution = 20; slamObj = lidarSLAM(mapResolution,maxLidarRange); slamObj.LoopClosureThreshold = 210; slamObj.LoopClosureSearchRadius = 8;
Agregue escaneos de forma iterativa al objeto SLAM.
for i = 1:numel(scans) addScan(slamObj,scans{i}); end
Crea una copia del objeto SLAM. Muestra el gráfico de pose subyacente del objeto SLAM.
slamObj2 = copy(slamObj); slamObj2.PoseGraph
ans =
poseGraph with properties:
NumNodes: 71
NumEdges: 83
NumLoopClosureEdges: 13
LoopClosureEdgeIDs: [31 36 63 65 67 69 71 73 75 77 79 81 83]
LandmarkNodeIDs: [1×0 double]
Elimine los dos primeros cierres de bucle especificando sus ID de borde.
lcEdgeIDs = slamObj2.PoseGraph.LoopClosureEdgeIDs(1:2); removeLoopClosures(slamObj2,lcEdgeIDs)
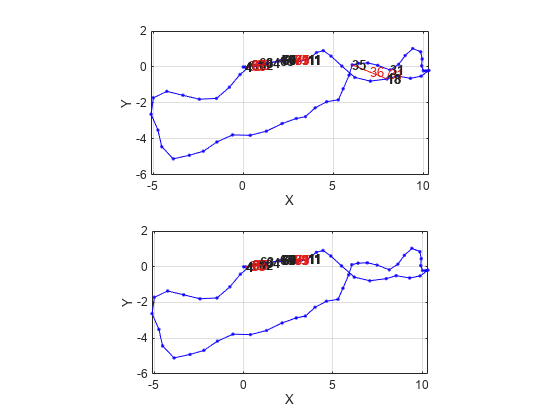
Trace los gráficos de pose del objeto SLAM antes y después de eliminar los cierres de bucle.
subplot(2,1,1) show(slamObj.PoseGraph); subplot(2,1,2) show(slamObj2.PoseGraph);
Argumentos de entrada
Capacidades ampliadas
Historial de versiones
Introducido en R2019b