poseGraph
Crear gráfico de pose 2D
Descripción
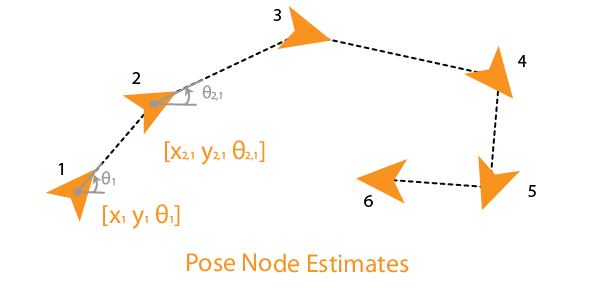
Un objeto poseGraph almacena información para una representación gráfica de pose en 2D. Un gráfico de pose contiene nodos conectados por aristas. La estimación de cada nodo está conectada al gráfico mediante restricciones de borde que definen la pose relativa entre los nodos y la incertidumbre en esa medición.
Para construir un gráfico de pose de forma iterativa, utilice la función addRelativePose para agregar estimaciones de pose relativas y conectarlas a un nodo existente con restricciones de borde especificadas. Los nodos de pose deben especificarse en relación con un nodo de pose. Especificar la incertidumbre de la medición mediante una matriz de información.
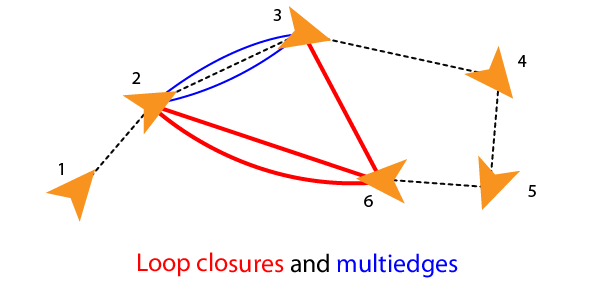
Agregar un borde entre dos nodos no secuenciales crea un cierre de bucle en el gráfico. También se admiten múltiples bordes o multibordes entre pares de nodos, lo que incluye cierres de bucle. Para agregar restricciones de borde adicionales o cierres de bucle, especifique los ID de nodo utilizando la función addRelativePose. Al optimizar el gráfico de pose, la función optimizePoseGraph encuentra una solución para satisfacer todas estas restricciones de borde.
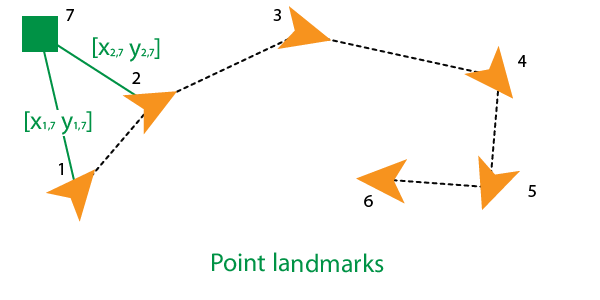
Para agregar nodos de puntos de referencia, utilice la función addPointLandmark. Esta función especifica los nodos como puntos xy sin estimaciones de orientación. Los puntos de referencia deben especificarse en relación con un nodo de pose.
El objeto lidarSLAM realiza localización y mapeo simultáneos basados en lidar, que se basan en la optimización de un gráfico de posición 2-D.
Para gráficos de poses en 3D, consulte el objeto poseGraph3D o el ejemplo SLAM de punto de referencia usando marcadores AprilTag.
Creación
Descripción
poseGraph = poseGraph crea un objeto gráfico de pose en 2D. Agregue poses usando addRelativePose para construir un gráfico de poses de forma iterativa.
poseGraph = poseGraph('MaxNumEdges',maxEdges,'MaxNumNodes',maxNodes) especifica un límite superior en la cantidad de bordes y nodos permitidos en el gráfico de pose al generar código. Esta sintaxis solo es necesaria al generar código.
Propiedades
Funciones del objeto
addPointLandmark | Agregar un nodo de punto de referencia al gráfico de pose |
addRelativePose | Agregar pose relativa al gráfico de pose |
copy | Crear copia del gráfico de pose |
edgeNodePairs | Pares de nodos de borde en gráfico de pose |
edgeConstraints | Restricciones de borde en el gráfico de pose |
edgeResidualErrors | Calcular los errores residuales del borde del gráfico de pose |
findEdgeID | Encuentra el ID del borde del borde |
nodeEstimates | Poses de nodos en el gráfico de poses. |
removeEdges | Eliminar los bordes de cierre del bucle del gráfico |
show | Trazar gráfico de pose |
Ejemplos
Optimice un gráfico de pose en función de los nodos y las restricciones de los bordes. El gráfico de pose utilizado en este ejemplo proviene del Conjunto de datos de Intel Research Lab y se generó a partir de la recopilación de información de la odometría de las ruedas y de un sensor de telémetro láser en un laboratorio interior.
Cargue el conjunto de datos Intel® que contiene un gráfico de pose 2-D. Inspeccione el objeto poseGraph para ver la cantidad de nodos y cierres de bucle.
load intel-2d-posegraph.mat pg disp(pg)
poseGraph with properties:
NumNodes: 1228
NumEdges: 1483
NumLoopClosureEdges: 256
LoopClosureEdgeIDs: [1228 1229 1230 1231 1232 1233 1234 1235 1236 1237 1238 1239 1240 1241 1242 1243 1244 1245 1246 1247 1248 1249 1250 1251 1252 1253 1254 1255 1256 1257 1258 1259 1260 1261 1262 1263 1264 1265 1266 1267 1268 1269 … ] (1×256 double)
LandmarkNodeIDs: [1×0 double]
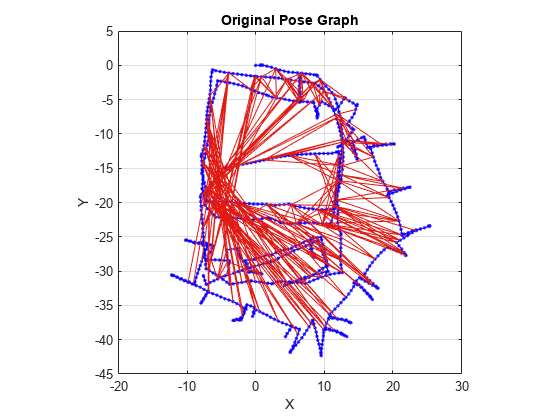
Traza el gráfico de pose con las identificaciones desactivadas. Las líneas rojas indican cierres de bucle identificados en el conjunto de datos.
show(pg,'IDs','off'); title('Original Pose Graph')
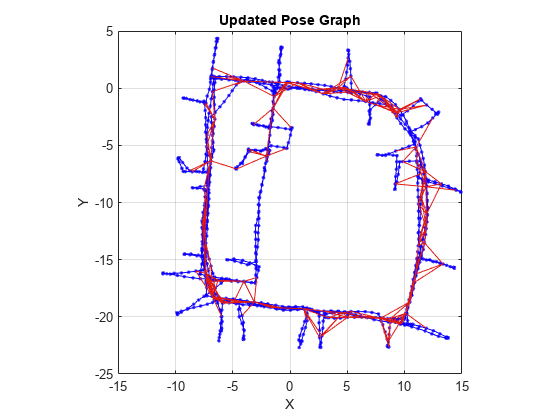
Optimiza el gráfico de pose. Los nodos se ajustan en función de las restricciones de los bordes y los cierres de bucles. Trace el gráfico de pose optimizado para ver el ajuste de los nodos con cierres de bucle.
updatedPG = optimizePoseGraph(pg); figure show(updatedPG,'IDs','off'); title('Updated Pose Graph')
Referencias
[1] Grisetti, G., R. Kummerle, C. Stachniss, and W. Burgard. "A Tutorial on Graph-Based SLAM." IEEE Intelligent Transportation Systems Magazine. Vol. 2, No. 4, 2010, pp. 31–43. doi:10.1109/mits.2010.939925.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b