occupancyMap
Crear mapa de ocupación 2-D
Descripción
occupancyMap crea un objeto de mapa de cuadrícula de ocupación 2-D. Cada celda de la cuadrícula de ocupación tiene un valor que representa la probabilidad de ocupación de la celda. Los valores cercanos a 1 representan una alta probabilidad de que la celda contenga un obstáculo. Valores cercanos a 0 representan una alta probabilidad de que la celda no esté ocupada y libre de obstáculos.
Los mapas de ocupación se utilizan en algoritmos de navegación como la planificación de rutas (véase plannerRRT). También se utilizan en aplicaciones de mapeo para encontrar caminos sin colisiones, realizar evasión de colisiones y calcular la localización (ver monteCarloLocalization). Puede modificar su mapa de ocupación para adaptarlo a su aplicación específica.
Los objetos occupancyMap admiten coordenadas locales, coordenadas mundiales e índices de cuadrícula. La primera ubicación de la cuadrícula con índice (1,1) comienza en la esquina superior izquierda de la cuadrícula.
Utilice la clase occupancyMap para crear mapas 2D de un entorno con valores de probabilidad que representen diferentes obstáculos en su mundo. Puede especificar valores de probabilidad exactos de las células o incluir observaciones de sensores como escáneres láser.
Los valores de probabilidad se almacenan utilizando un filtro Bayes binario para estimar la ocupación de cada celda de la cuadrícula. Se utiliza una representación de probabilidades logarítmicas, con valores almacenados como int16 para reducir el tamaño de almacenamiento del mapa y permitir aplicaciones en tiempo real.
Creación
Sintaxis
Descripción
map = occupancyMap(width,height,resolution)resolution establece la propiedad Resolution.
map = occupancyMap(rows,cols,resolution,'grid')rows y cols establecen la propiedad GridSize.
map = occupancyMap(p)p. El tamaño de la cuadrícula coincide con el tamaño de la matriz, y el valor de probabilidad de cada celda se interpreta a partir de la ubicación de la matriz.
map = occupancyMap(p,resolution)
map = occupancyMap( crea un objeto utilizando valores de otro objeto sourcemap)occupancyMap.
map = occupancyMap( crea un objeto utilizando valores de otro objeto sourcemap,resolution)occupancyMap, pero remuestrea la matriz para tener la resolución especificada.
Argumentos de entrada
Propiedades
Funciones del objeto
checkOccupancy | Consultar si las localidades están libres u ocupadas |
copy | Crear copia del mapa de ocupación 2-D |
getOccupancy | Obtener probabilidad de ocupación de ubicaciones |
grid2local | Convertir los índices de la cuadrícula en coordenadas locales |
grid2world | Convertir los índices de la cuadrícula en coordenadas del mundo real |
inflate | Agrandar cada ubicación ocupada |
insertRay | Insertar rayo de observación con escaneo láser. |
local2grid | Convertir coordenadas locales a índices de cuadrícula |
local2world | Convertir coordenadas locales a coordenadas mundiales |
move | Mover mapa en el marco mundial |
occupancyMatrix | Convertir mapa de ocupación a matriz |
raycast | Calcular índices de celdas a lo largo de un rayo. |
rayIntersection | Encuentra puntos de intersección de rayos y celdas de mapa ocupadas. |
setOccupancy | Establecer probabilidad de ocupación de ubicaciones |
show | Mostrar mapa de ocupación 2-D |
syncWith | Sincronizar mapa con mapa superpuesto |
updateOccupancy | Actualizar probabilidad de ocupación en ubicaciones |
world2grid | Convertir coordenadas mundiales a índices de cuadrícula |
world2local | Convertir coordenadas mundiales a coordenadas locales |
Ejemplos
Cree un mapa de cuadrícula de ocupación vacío.
map = occupancyMap(10,10,20);
Especifique la pose del vehículo, los alcances, los ángulos y el alcance máximo del escaneo láser.
pose = [5,5,0]; ranges = 3*ones(100,1); angles = linspace(-pi/2,pi/2,100); maxrange = 20;
Crea un objeto lidarScan con los rangos y ángulos especificados.
scan = lidarScan(ranges,angles);
Inserte los datos del escaneo láser en el mapa de ocupación.
insertRay(map,pose,scan,maxrange);
Muestre el mapa para ver los resultados de insertar el escaneo láser.
show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](insertlaserscansintooccupancymapexample_0188cabe52d5520803aed8bf8b16ad5f1e_es.png)
Verifique la ocupación del lugar directamente frente al vehículo.
getOccupancy(map,[8 5])
ans = 0.7000
Agregue una segunda lectura y vea la actualización de los valores de ocupación. La lectura adicional aumenta la confianza en las lecturas. Los valores libres y ocupados se vuelven más distintos.
insertRay(map,pose,scan,maxrange); show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](insertlaserscansintooccupancymapexample_02_es.png)
getOccupancy(map,[8 5])
ans = 0.8448
Convierte un archivo de mapa de grises portátil (PGM) que contiene un mapa ROS en un occupancyMap para usar en MATLAB ®.
Importe la imagen usando imread. Recorta la imagen en el área del parque.
image = imread('playpen_map.pgm');
imageCropped = image(750:1250,750:1250);
imshow(imageCropped)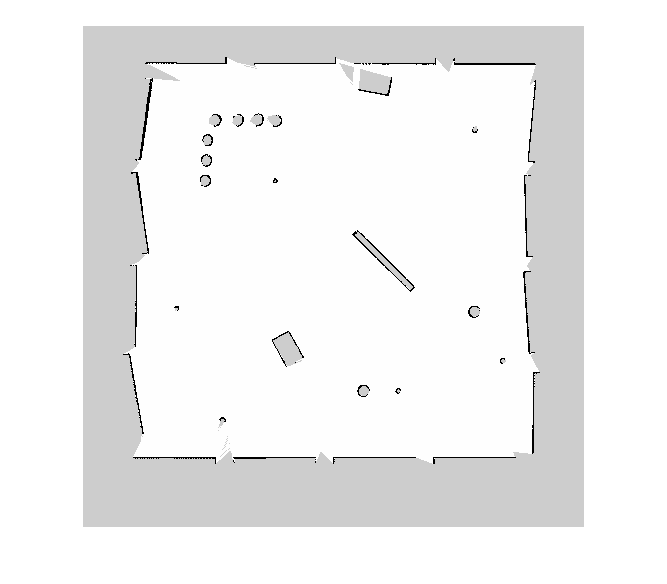
Los valores PGM se expresan de 0 a 255 como uint8. Normalice estos valores convirtiendo la imagen recortada a double y dividiendo cada celda por 255. Esta imagen muestra los obstáculos con valores cercanos a 0. Resta la imagen normalizada de 1 para obtener valores de ocupación, donde 1 representa el espacio ocupado.
imageNorm = double(imageCropped)/255; imageOccupancy = 1 - imageNorm;
Crea el objeto occupancyMap utilizando una imagen de mapa ajustada. La resolución del mapa importado es de 20 celdas por metro.
map = occupancyMap(imageOccupancy,20); show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](convertpgmimagetomapexample_02d93fa5713f1cb6f0e797cb6dcc1ee8c3_es.png)
Limitaciones
Los valores de ocupación tienen una resolución limitada de ±0,001. Los valores se almacenan como int16 utilizando una representación de probabilidades logarítmicas. Este tipo de datos limita la resolución, pero ahorra memoria al almacenar mapas grandes en MATLAB®. Al llamar a setOccupancy y luego a getOccupancy, es posible que el valor devuelto no sea igual al valor establecido. Para obtener más información, consulte la sección de representaciones de probabilidades logarítmicas en Cuadrículas de ocupación.
Si el tamaño de la memoria es una limitación, considere utilizar binaryOccupancyMap en su lugar. El mapa de ocupación binario utiliza menos memoria con valores binarios, pero aún funciona con algoritmos Navigation Toolbox™ y otras aplicaciones.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b
Consulte también
binaryOccupancyMap | mobileRobotPRM (Robotics System Toolbox) | controllerPurePursuit (Robotics System Toolbox) | rosReadOccupancyGrid (ROS Toolbox) | rosWriteOccupancyGrid (ROS Toolbox)