Pure Pursuit
Comandos de control lineal y de curvatura

Bibliotecas:
Robotics System Toolbox /
Mobile Robot Algorithms
Navigation Toolbox /
Control Algorithms
Descripción
El bloque Pure Pursuit calcula los comandos de velocidad lineal y curvatura para seguir una trayectoria usando un conjunto de waypoints y la pose actual de un vehículo tipo automóvil o con tracción diferencial. El bloque toma poses actualizadas para actualizar los comandos de velocidad lineal y curvatura para que el vehículo siga una trayectoria a lo largo de un conjunto de waypoints deseado. Use los parámetros Max curvature y Desired linear velocity para actualizar la curvatura y la velocidad lineal, respectivamente, basándose en el rendimiento del vehículo.
El parámetro y el puerto de distancia lookahead calculan un punto lookahead en la trayectoria, que es un objetivo local instantáneo para el vehículo. El comando de curvatura se calcula a partir de este punto. Cambiar la distancia lookahead tiene un impacto significativo en el rendimiento del algoritmo. Una mayor distancia lookahead da como resultado una trayectoria más suave, pero puede provocar que el vehículo tome un atajo durante la trayectoria. Una distancia lookahead menor puede producir oscilaciones en el seguimiento de la trayectoria, lo que causaría un comportamiento inestable. Para obtener más información sobre el algoritmo Pure Pursuit, consulte Controlador de Pure Pursuit.
Ejemplos

Seguimiento de caminos con evasión de obstáculos en Simulink
Utilice Simulink ® para evitar obstáculos mientras sigue la ruta de un robot con accionamiento diferencial. Este ejemplo utiliza ROS para enviar y recibir información de un simulador basado en MATLAB. Puede reemplazar el simulador con otros simuladores basados en ROS como Gazebo®.
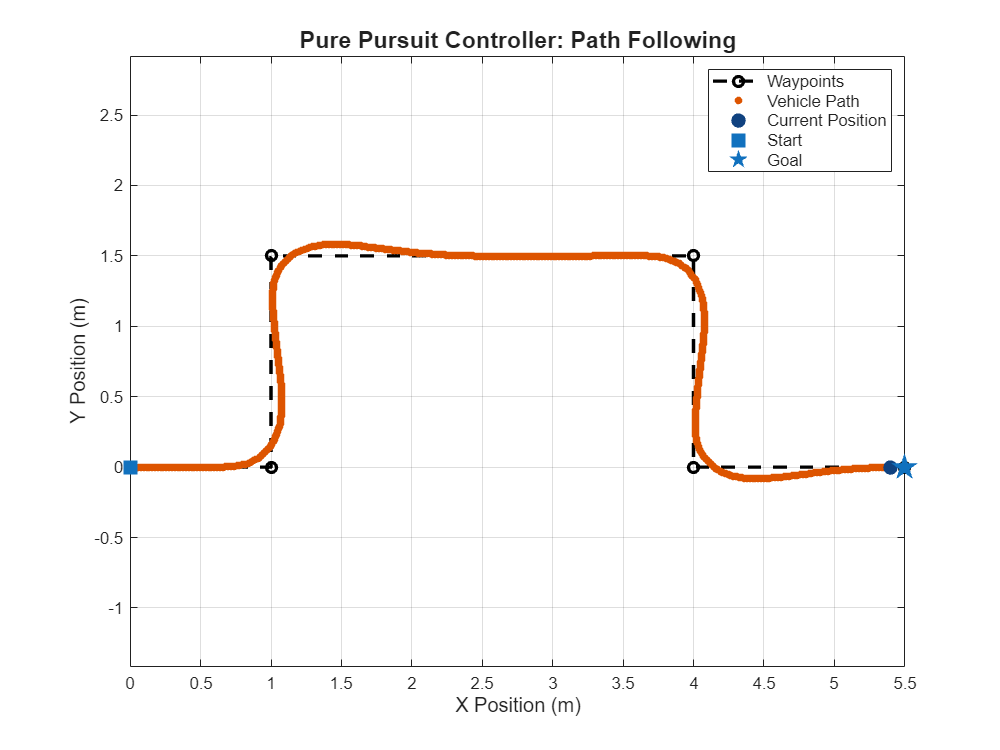
Follow Waypoints in Simulink Using Pure Pursuit Block
Guide a car-like vehicle along a series of waypoints in Simulink using the Pure Pursuit block.