grpdelay
Retardo promedio del filtro (retardo de grupo)
Sintaxis
Descripción
[ devuelve la respuesta de retardo de grupo del filtro digital especificado. Especifique un filtro digital con coeficientes del numerador gd,w] = grpdelay(b,a,n)b y coeficientes del denominador a. La función devuelve el vector de respuesta de retardo de grupo de n puntos en gd y el correspondiente vector de frecuencia angular w.
grpdelay(___) sin argumentos de salida representa la respuesta de retardo de grupo del filtro.
Ejemplos
Diseñe un filtro Butterworth de sexto orden con 3 dB normalizados de frecuencia de rad/muestra. Utilice grpdelay para mostrar el retardo de grupo.
[z,p,k] = butter(6,0.2); sos = zp2sos(z,p,k); grpdelay(sos,128)

Represente tanto el retardo de grupo como el retardo de fase del sistema en la misma figura.
gd = grpdelay(sos,512); [h,w] = freqz(sos,512); pd = -unwrap(angle(h))./w; plot(w/pi,gd,w/pi,pd) grid xlabel 'Normalized Frequency (\times\pi rad/sample)' ylabel 'Group and phase delays' legend('Group delay','Phase delay')

Utilice designfilt para diseñar un filtro Butterworth de sexto orden con 3 dB normalizados de frecuencia de rad/muestra. Muestre su respuesta de retardo de grupo.
d = designfilt("lowpassiir",FilterOrder=6, ... HalfPowerFrequency=0.2,DesignMethod="butter"); grpdelay(d)

Diseñe un filtro FIR de 88.º orden de respuesta de magnitud arbitraria. El filtro tiene dos bandas de paso y dos bandas de parada. La banda de paso de menor frecuencia tiene el doble de ganancia que la frecuencia de paso de mayor frecuencia. Especifique una tasa de muestreo de 200 Hz. Visualice la respuesta de magnitud y la respuesta de fase del filtro de 10 Hz a 78 Hz.
fs = 200; d = designfilt('arbmagfir', ... 'FilterOrder',88, ... 'NumBands',4, ... 'BandFrequencies1',[0 20], ... 'BandFrequencies2',[25 40], ... 'BandFrequencies3',[45 65], ... 'BandFrequencies4',[70 100], ... 'BandAmplitudes1',[2 2], ... 'BandAmplitudes2',[0 0], ... 'BandAmplitudes3',[1 1], ... 'BandAmplitudes4',[0 0], ... 'SampleRate',fs); freqz(d,10:1/fs:78,fs)

Calcule y muestre la respuesta de retardo de grupo del filtro a lo largo del mismo rango de frecuencia. Compruebe que sea una mitad del orden del filtro.
filtord(d)
ans = 88
grpdelay(d,10:1/fs:78,fs)

Desde R2024b
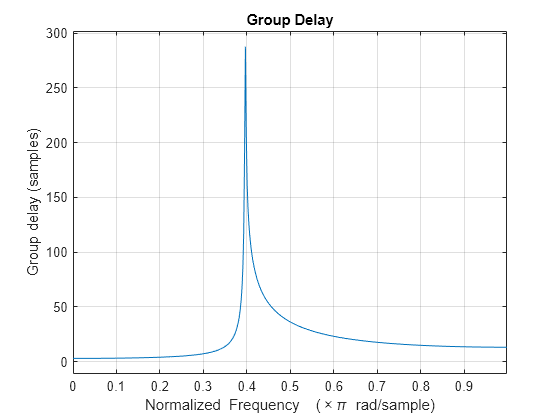
Diseñe un filtro digital paso bajo Chebyshev Tipo II de orden 40 con una frecuencia de borde de banda de parada de 0,4 y una atenuación de la banda de parada de 50 dB. Represente la respuesta de retardo de grupo del filtro utilizando coeficientes en formato CTF.
[B,A] = cheby2(40,50,0.4,"ctf"); grpdelay(B,A,"ctf")
Diseñe un filtro digital elíptico paso banda de orden 30 con unas frecuencias de borde de la banda de paso de 0,3 y 0,7, ondulación de la banda de paso de 0,1 dB y atenuación de la banda de parada de 50 dB. Represente la respuesta de retardo de grupo del filtro utilizando coeficientes y ganancia en formato CTF.
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); grpdelay({B,A,g},"ctf")

Argumentos de entrada
Argumentos de salida
Más acerca de
Sugerencias
Puede obtener filtros en formato CTF, incluida la ganancia de escala. Utilice las salidas de las funciones de diseño de filtros IIR digitales, como
butter,cheby1,cheby2yellip. Especifique el argumento de tipo de filtro"ctf"en estas funciones y especifique que se devuelvanB,Aygpara obtener los valores de escala. (desde R2024b)
Referencias
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006aConsulte también
Apps
Funciones
ctffilt|cceps|designfilt|digitalFilter|fft|freqz|hilbert|icceps|phasedelay|rceps