rlocusplot
Gráfica del lugar de las raíces del sistema dinámico
Descripción
La función rlocusplot representa el lugar de las raíces del modelo de sistema dinámico y devuelve un objeto de gráfico RLocusPlot. Para personalizar la gráfica, modifique las propiedades del objeto de gráfico utilizando la notación de puntos. Para obtener más información, consulte Customize Linear Analysis Plots at Command Line.
Para obtener las ganancias de retroalimentación y las ubicaciones de raíces complejas, utilice la función rlocus.
Creación
Sintaxis
Descripción
rlp = rlocusplot(sys)sys y devuelve el objeto de gráfico correspondiente.
Para producir una gráfica suave, la función rlocusplot selecciona automáticamente un conjunto de ganancias de retroalimentación positivas.
rlp = rlocusplot(___,k)k. Puede especificar un rango de frecuencia o un vector de frecuencias. Puede utilizar k con cualquiera de las combinaciones de argumentos de entrada de sintaxis anteriores.
rlp = rlocusplot(___,plotoptions)plotoptions. La configuración que especifica en plotoptions anula las preferencias de representación gráfica de la sesión de MATLAB® en curso.
rlp = rlocusplot(parent,___)Figure o TiledChartLayout, y establece la propiedad Parent. Utilice esta sintaxis cuando desee crear una gráfica en una figura abierta especificada o cuando cree aplicaciones en App Designer.
Argumentos de entrada
Propiedades
Funciones del objeto
addResponse | Add dynamic system response to existing response plot |
Ejemplos
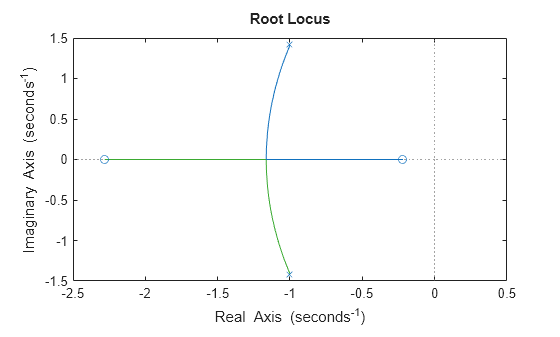
Represente el lugar de la raíces del modelo de sistema dinámico SISO.
sys = tf([2 5 1],[1 2 3]); rlp = rlocusplot(sys);
Más acerca de
Sugerencias
Las gráficas creadas con
rlocusplotno admiten títulos ni etiquetas multilínea especificados como arreglos de cadenas o arreglos de celdas de vectores de caracteres. Para especificar títulos y etiquetas multilínea, utilice una cadena única con un carácternewline.rlocusplot(sys) title("first line" + newline + "second line");