collisionMesh
Cree una geometría de colisión en forma de malla convexa
Descripción
Utilice collisionMesh para crear una geometría de colisión como una malla convexa usando una lista de vértices 3D relativa al marco elegido.
Creación
Descripción
MSH = collisionMesh( crea una geometría de colisión en forma de malla convexa a partir de la lista de Vertices 3D. Los vértices se especifican con relación a un marco de elección (marco de geometría de colisión). De forma predeterminada, el marco de la geometría de colisión se conecta con el marco del mundo real.Vertices)
MSH = collisionMesh(___,Pose= establece la propiedad pose)Pose de la malla en pose, relativa al marco del mundo real.
Propiedades
Funciones del objeto
checkCollision | Comprobar si dos geometrías están en colisión |
fitCollisionCapsule | Ajustar la cápsula de colisión alrededor de la geometría de colisión |
show | Muestre la geometría de colisión |
Ejemplos
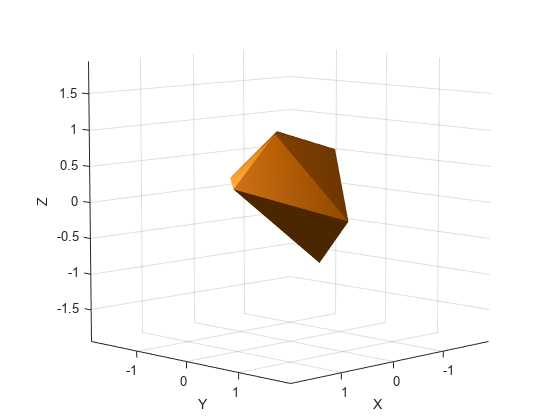
Cree un arreglo compuesto por las coordenadas de diez puntos elegidos aleatoriamente en la esfera unitaria. Para que sea reproducible, establezca el valor inicial aleatoria en el valor predeterminado.
rng default n = 10; pts = zeros(n,3); for k = 1:n ph = 2*pi*rand(1); th = pi*rand(1); pts(k,:) = [cos(th)*sin(ph) sin(th)*sin(ph) cos(ph)]; end
Cree una geometría de colisión en forma de malla convexa a partir del arreglo. Visualice la geometría de colisión.
m = collisionMesh(pts); show(m)
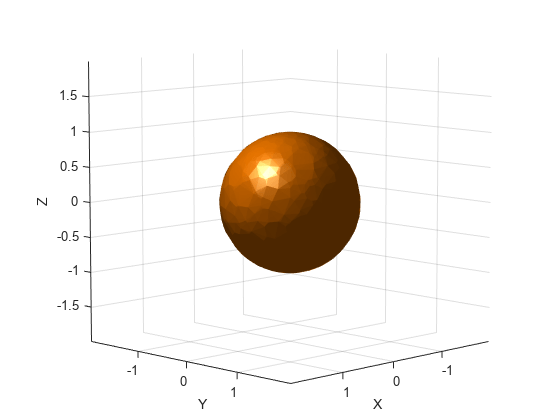
Cree un segundo arreglo similar al primero, pero esta vez compuesto por 1000 puntos elegidos aleatoriamente en la esfera unitaria.
n = 1000; pts2 = zeros(n,3); for k = 1:n ph = 2*pi*rand(1); th = pi*rand(1); pts2(k,:) = [cos(th)*sin(ph) sin(th)*sin(ph) cos(ph)]; end
Cree y visualice una geometría de colisión en forma de malla a partir del arreglo. Observe que al elegir más puntos en la esfera se obtiene una malla similar a una esfera.
m2 = collisionMesh(pts2); show(m2)
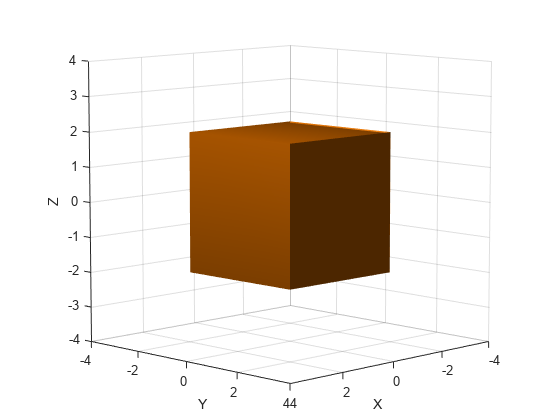
Cree un arreglo compuesto por las coordenadas de las ocho esquinas de un cubo. El cubo está centrado en el origen y tiene una longitud lateral de 4.
cubeCorners = [-2 -2 -2 ; -2 2 -2 ; 2 -2 -2 ; 2 2 -2 ;...
-2 -2 2 ; -2 2 2 ; 2 -2 2 ; 2 2 2]cubeCorners = 8×3
-2 -2 -2
-2 2 -2
2 -2 -2
2 2 -2
-2 -2 2
-2 2 2
2 -2 2
2 2 2
Adjunte cubeCorners a pts2. Cree y visualice la geometría de colisión en forma de malla a partir del arreglo nuevo. Dado que el cubo contiene la esfera, los puntos de la esfera que están dentro del cubo no se tienen en cuenta al crear la geometría.
pts3 = [pts2;cubeCorners]; m3 = collisionMesh(pts3); show(m3)
Capacidades ampliadas
Historial de versiones
Introducido en R2019bConsulte también
Objetos
Funciones
checkCollision|fitCollisionCapsule|showCollisionArray(Robotics System Toolbox) |collisionVHACD(Robotics System Toolbox)