plan
Encuentra la ruta más corta y libre de obstáculos entre dos puntos
Sintaxis
Descripción
path = plan(planner,start,goal)path, entre un punto de inicio especificado, start, y un punto de destino, goal, especificado como [row column] en el marco de la cuadrícula con origen en la esquina superior izquierda, utilizando el planificador de ruta A* especificado planner.
path = plan(planner,start,goal,'world')path, entre un punto de inicio especificado, start, y un punto de destino, goal, especificado como [x y] en el marco de coordenadas mundial con origen en la esquina inferior izquierda, utilizando el planificador de ruta A* especificado planner.
Ejemplos
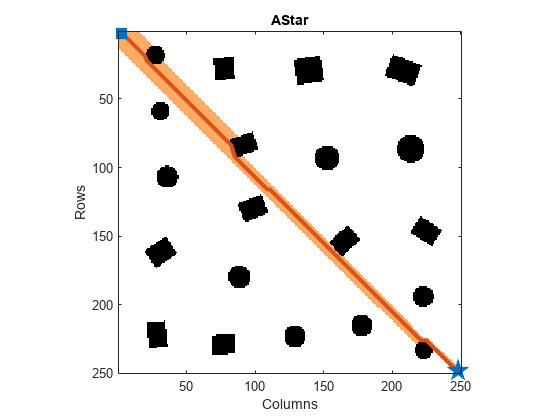
Planifique la ruta más corta sin colisiones a través de un mapa de cuadrícula de obstáculos utilizando el algoritmo de planificación de ruta A*.
Genere un objeto binaryOccupancyMap con obstáculos dispersos aleatoriamente utilizando la función mapClutter.
rng('default');
map = mapClutter;Utilice el mapa para crear un objeto plannerAStarGrid.
planner = plannerAStarGrid(map);
Definir los puntos de inicio y meta.
start = [2 3]; goal = [248 248];
Planifique una ruta desde el punto de inicio hasta el punto de destino.
plan(planner,start,goal);
Visualice la ruta y los nodos explorados utilizando la función de objeto show.
show(planner)
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2020b