closestPointsToSequence
Sintaxis
Descripción
pathPoints = closestPointsToSequence(refPath,points,initWindow)points, para estar dentro de la ventana de búsqueda válida, initWindow. Para cada punto en Points, la ventana de búsqueda se centra en el punto anterior.
[ devuelve opcionalmente un vector lógico pathPoints,inWindow] = closestPointsToSequence(refPath,points,initWindow)inWindow, que especifica si cada punto de la coordenada xy correspondiente en points se proyecta dentro de la ventana de búsqueda.
Ejemplos
[refPath,generator,f0,f1] = closestPointExampleSetup;
Defina las funciones auxiliares de la trama.
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1); plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))), ... mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:}); plotInterval = @(bounds,nPt,linespec)plotFcn(interpolate(... refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);
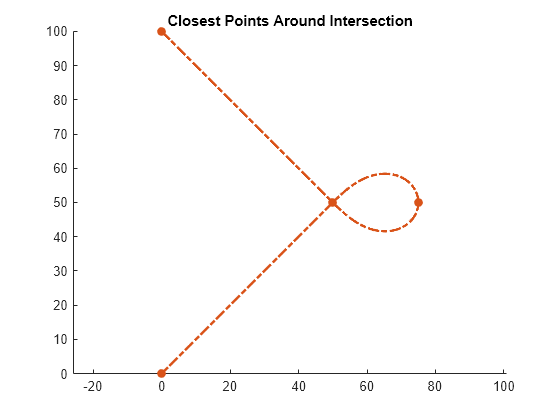
Genere una trayectoria que a su vez contenga una intersección.
f2 = f1; f2(1) = refPath.SegmentParameters(4,end) + 20;
Establezca los estados de modo que comience desde el reposo y termine con una velocidad positiva y sin aceleración.
f0(2) = 0; % Initial lon. speed set to 0 f2(2) = 5; % Terminal lon. speed set to 5 deltaS = (f2(1)-f0(1)); % Longitudinal distance traveled vAvgEstimate = (f2(2)-f0(2))/2; % Rough average lon. velocity estimate T2 = deltaS/vAvgEstimate; % Ballpark travel duration
Generar la trayectoria.
[fIntersecting,gIntersecting] = connect(generator,f0,f2,T2); gXingPts = gIntersecting.Trajectory;
Trazar la trayectoria.
figure
show(refPath);
xlim([0 125])
ylim([0 125])
hold on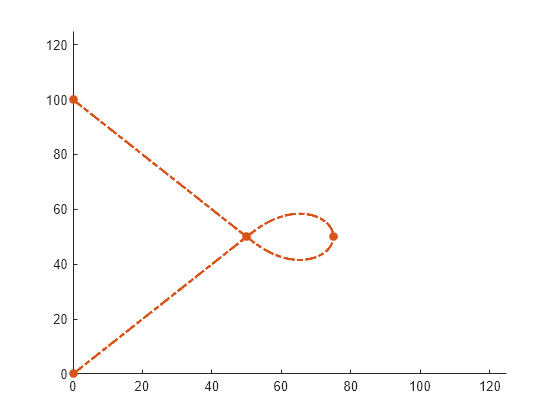
Encuentre los puntos más cercanos a lo largo de la trayectoria.
closestPts = closestPoint(refPath,gXingPts);
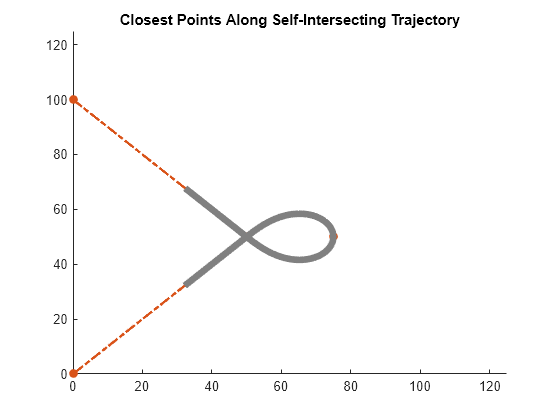
Encuentre los puntos más cercanos en la ventana que abarque toda la trayectoria.
windowBuffer = 5; fXingPts = fIntersecting.Trajectory; fixedWindow = [min(fXingPts(:,1))-windowBuffer max(fXingPts(:,1))+windowBuffer]; closestPtsFullWindow = closestPoint(refPath,gXingPts,fixedWindow);
Traza aquí los ingenuos puntos más cercanos.
title("Closest Points Along Self-Intersecting Trajectory") plotInterval(fixedWindow,100,{"Color",[.5 .5 .5],"LineWidth",5});
Calcule el tamaño de una ventana deslizante en función de la velocidad global máxima. Tenga en cuenta que es posible que esto no cubra la trayectoria dependiendo de la forma de la ruta de referencia.
dsApprox = max(abs(gXingPts(:,5)))*generator.TimeResolution; initialWindow = fXingPts(1)+[-1 1]*dsApprox; [closestPtsSlidingWindow, inWindow] = closestPointsToSequence(refPath,gXingPts,initialWindow);
Calcule la región barrida por la ventana deslizante. Luego trace la región barrida.
sweptRegion = [closestPtsSlidingWindow(1,end)-dsApprox,closestPtsSlidingWindow(end-1,end)+dsApprox];
plotInterval(sweptRegion,100,{":","Color",[.25 .25 .25],"LineWidth",3});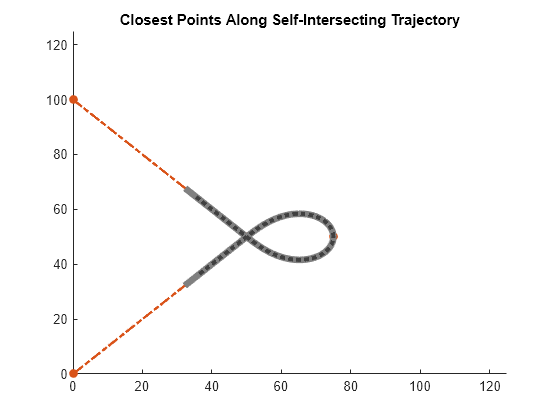
finalWindow = [closestPtsSlidingWindow(end-1,end)-dsApprox,closestPtsSlidingWindow(end-1,end)+dsApprox];
plotInterval(finalWindow,100,{"k","LineWidth",5});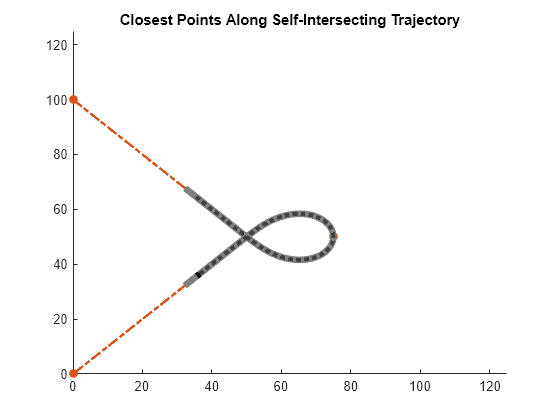
Mostrar resultados.
plotFcn(gXingPts,[],{"k.-"});
plotFcn(gXingPts,closestPts,{"b","LineWidth",3});
plotFcn(gXingPts,closestPtsFullWindow,{"m","LineWidth",2})
plotFcn(gXingPts(inWindow,:),closestPtsSlidingWindow(inWindow,:),{"g"});
plotFcn(gXingPts(~inWindow,:),closestPtsSlidingWindow(~inWindow,:),{"r"});
legend({"Waypoints","ReferencePath","FixedWindow", ...
"SlidingWindowSweptRegion","SlidingWindowFinalSpan", ...
"Trajectory", "ClosestPoint","ClosestInsideFixedWindow", ...
"ClosestInsideSlidingWindow"});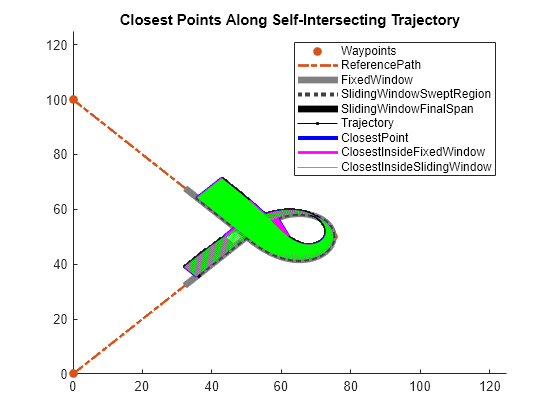
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2022a