trajectoryGeneratorFrenet
Encuentre la trayectoria óptima a lo largo de la ruta de referencia
Descripción
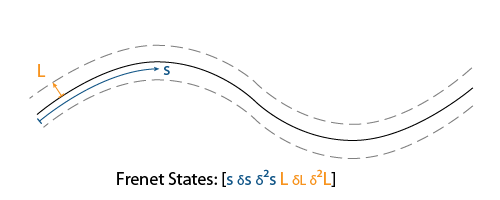
El objeto trajectoryGeneratorFrenet genera trayectorias alternativas utilizando polinomios de cuarto o quinto orden relativos a una ruta de referencia determinada. Cada trayectoria define un movimiento entre estados de Frenet durante un período de tiempo específico.
Los estados de Frenet describen su posición, velocidad y aceleración en relación con una ruta de referencia estática, especificada como un objeto referencePathFrenet.
El objeto expresa los estados de Frenet como un vector con la forma [S dS ddS L dL ddL], donde S es la longitud del arco y L es la desviación perpendicular de la dirección de la ruta de referencia. Las derivadas de S son relativas al tiempo. Las derivadas de L son relativas a la longitud del arco, S.
Para generar trayectorias alternativas, especifique los estados de Frenet inicial y terminal con un lapso de tiempo determinado para la función del objeto connect.
Creación
Sintaxis
Descripción
connectorFrenet = trajectoryGeneratorFrenet( genera trayectorias entre estados iniciales y terminales en relación con una ruta de referencia refPath)refPath especificada como un objeto referencePathFrenet. El argumento de entrada refPath establece la propiedad ReferencePath.
connectorFrenet = trajectoryGeneratorFrenet( especifica el intervalo de tiempo para la discretización. El argumento refPath,'TimeResolution',timeValue)timeValue establece la propiedad TimeResolution.
Propiedades
Funciones del objeto
connect | Conectar los estados inicial y terminal de Frenet |
createParallelState | Crear estados usando Frenet y parámetros globales. |
Ejemplos
Generar trayectorias alternativas para una ruta de referencia utilizando coordenadas de Frenet. Especifique diferentes estados iniciales y terminales para sus trayectorias. Ajusta tus estados en función de las trayectorias generadas.
Genere una ruta de referencia a partir de un conjunto de puntos de referencia. Crea un objeto trajectoryGeneratorFrenet a partir de la ruta de referencia.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
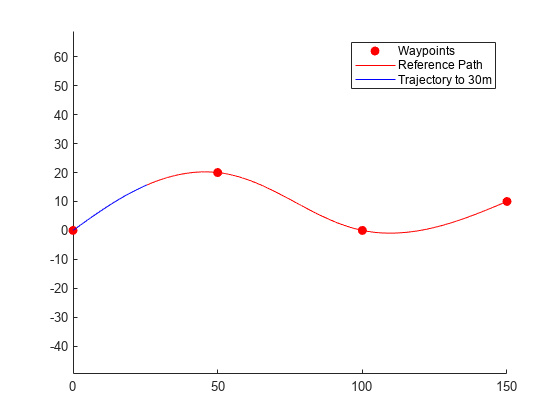
Genere una trayectoria de cinco segundos entre el origen de la ruta y un punto a 30 m de la ruta como afirma Frenet.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Muestra la trayectoria en coordenadas globales.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
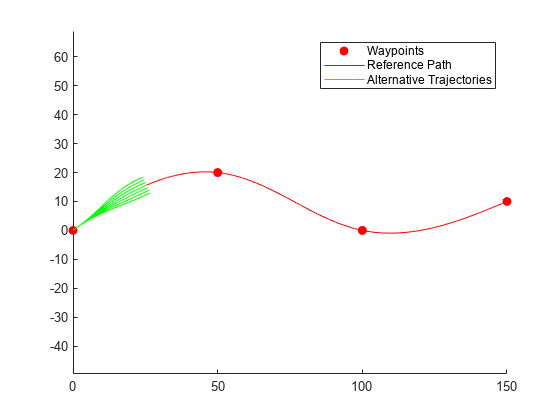
Cree una matriz de estados terminales con desviaciones laterales entre –3 my 3 m. Genera trayectorias que cubren la misma longitud de arco en 10 segundos, pero se desvían lateralmente de la ruta de referencia. Muestra las nuevas rutas alternativas.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
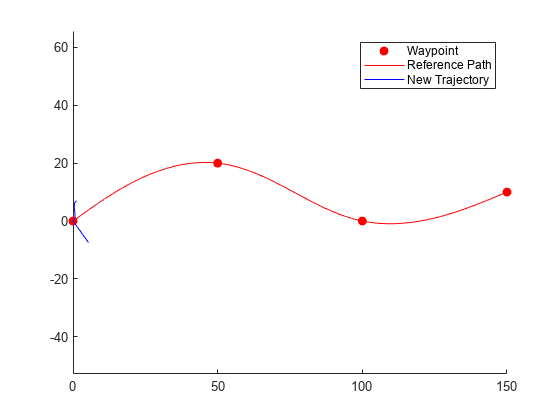
Especifique un nuevo estado terminal para generar una nueva trayectoria. Esta trayectoria no es deseable porque requiere un movimiento inverso para alcanzar una velocidad longitudinal de 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
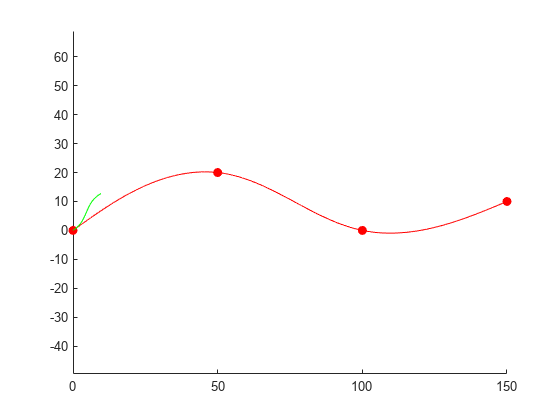
Relaje la restricción en el estado longitudinal especificando una longitud de arco de NaN. Genera y muestra la trayectoria nuevamente. La nueva posición muestra una buena trayectoria alternativa que se desvía de la trayectoria de referencia.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
Referencias
[1] Werling, Moritz, Julius Ziegler, Sören Kammel, and Sebastian Thrun. "Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame." 2010 IEEE International Conference on Robotics and Automation. 2010, pp. 987–993.
Capacidades ampliadas
Historial de versiones
Introducido en R2020b