referencePathFrenet
Ruta de referencia suave que se ajusta a los puntos de referencia
Descripción
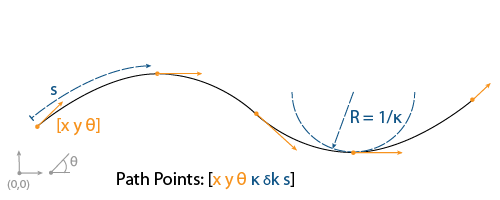
El objeto referencePathFrenet ajusta una curva suave, continua y por partes a un conjunto de puntos de referencia dados como [x y] o [x y theta]. Después de ajustar los puntos a lo largo de la curva, los puntos de la ruta se expresan como [x y theta kappa dkappa s], donde:
x y y theta— Estado SE(2) expresado en coordenadas globales, con x y y en metros y theta en radianes
kappa — Curvatura, o inversa del radio, en
m-1dkappa — Derivada de la curvatura con respecto a la longitud del arco en
m-2s — Longitud del arco, o distancia a lo largo de la trayectoria desde el origen de la trayectoria, en metros
Con este objeto, convierta trayectorias entre los sistemas de coordenadas globales y Frenet, interpola estados a lo largo de la ruta según la longitud del arco y consulte el punto más cercano en una ruta desde un estado global.
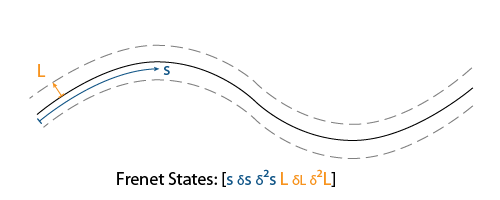
El objeto expresa los estados de Frenet como un vector con la forma [S dS ddS L dL ddL], donde S es la longitud del arco y L es la desviación perpendicular de la dirección de la ruta de referencia. Las derivadas de S son relativas al tiempo. Las derivadas de L son relativas a la longitud del arco, S.
Creación
Descripción
refPathObj = referencePathFrenet( ajusta un conjunto de curvas continuas y por partes a los puntos de referencia especificados. El argumento waypoints)waypoints establece la propiedad Waypoints.
refPathObj = referencePathFrenet(___, establece propiedades utilizando uno o más argumentos de pares nombre-valor además de los argumentos de entrada en la sintaxis anterior. Puede especificar las propiedades DiscretizationDistance y MaxNumWaypoints como argumentos de nombre-valor.Name,Value)
Propiedades
Funciones del objeto
closestPoint | Encuentre el punto más cercano en la ruta de referencia al punto global |
closestPointsToSequence | Proyecta una secuencia de puntos en la ruta |
closestProjections | Encuentre proyecciones ortogonales entre el vector tangente de ruta y el punto de consulta |
curvature | Curvatura de retorno en longitud de arco |
changeInCurvature | Retorno del cambio de curvatura en longitud de arco |
frenet2global | Convertir estados de Frenet en estados globales |
global2frenet | Convertir estados globales a estados de Frenet |
interpolate | Interpolar la ruta de referencia en las longitudes de arco proporcionadas |
position | Devuelve la posición xy en la longitud de arco |
tangentAngle | Ángulo tangente de retorno en longitud de arco |
show | Mostrar ruta de referencia en la figura |
copy | Copiar ruta de referencia |
Ejemplos
Generar trayectorias alternativas para una ruta de referencia utilizando coordenadas de Frenet. Especifique diferentes estados iniciales y terminales para sus trayectorias. Ajusta tus estados en función de las trayectorias generadas.
Genere una ruta de referencia a partir de un conjunto de puntos de referencia. Crea un objeto trajectoryGeneratorFrenet a partir de la ruta de referencia.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
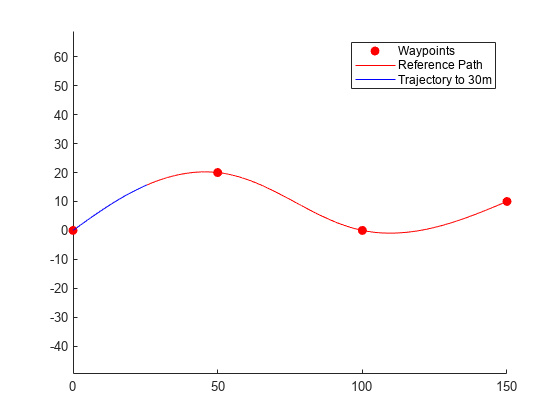
Genere una trayectoria de cinco segundos entre el origen de la ruta y un punto a 30 m de la ruta como afirma Frenet.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Muestra la trayectoria en coordenadas globales.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
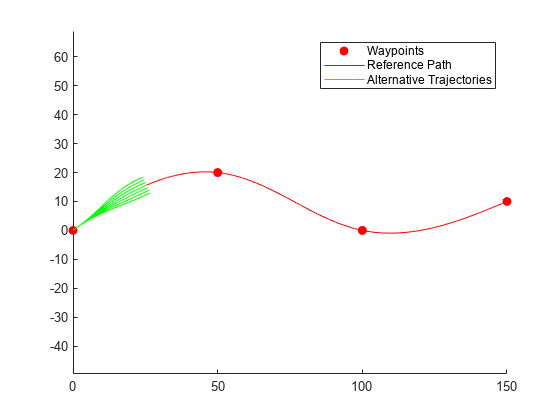
Cree una matriz de estados terminales con desviaciones laterales entre –3 my 3 m. Genera trayectorias que cubren la misma longitud de arco en 10 segundos, pero se desvían lateralmente de la ruta de referencia. Muestra las nuevas rutas alternativas.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
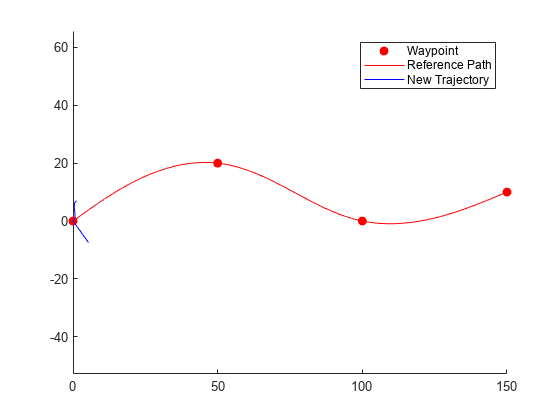
Especifique un nuevo estado terminal para generar una nueva trayectoria. Esta trayectoria no es deseable porque requiere un movimiento inverso para alcanzar una velocidad longitudinal de 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
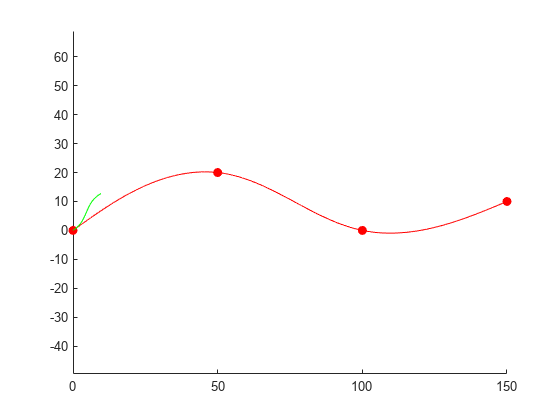
Relaje la restricción en el estado longitudinal especificando una longitud de arco de NaN. Genera y muestra la trayectoria nuevamente. La nueva posición muestra una buena trayectoria alternativa que se desvía de la trayectoria de referencia.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
Más acerca de
Referencias
[1] Werling, Moritz, Julius Ziegler, Sören Kammel, and Sebastian Thrun. "Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame." 2010 IEEE International Conference on Robotics and Automation. 2010, pp. 987–993.
[2] Bertolazzi, Enrico, and Marco Frego. “Fast and Accurate Clothoid Fitting.” Mathematical Methods in the Applied Sciences 38, no. 5 (March 30, 2015): 881–97. https://doi.org/10.1002/mma.3114.
Capacidades ampliadas
Historial de versiones
Introducido en R2020b