Prototipado Rápido de Control para un Motor Síncrono de Imanes Permanentes
Descripción general
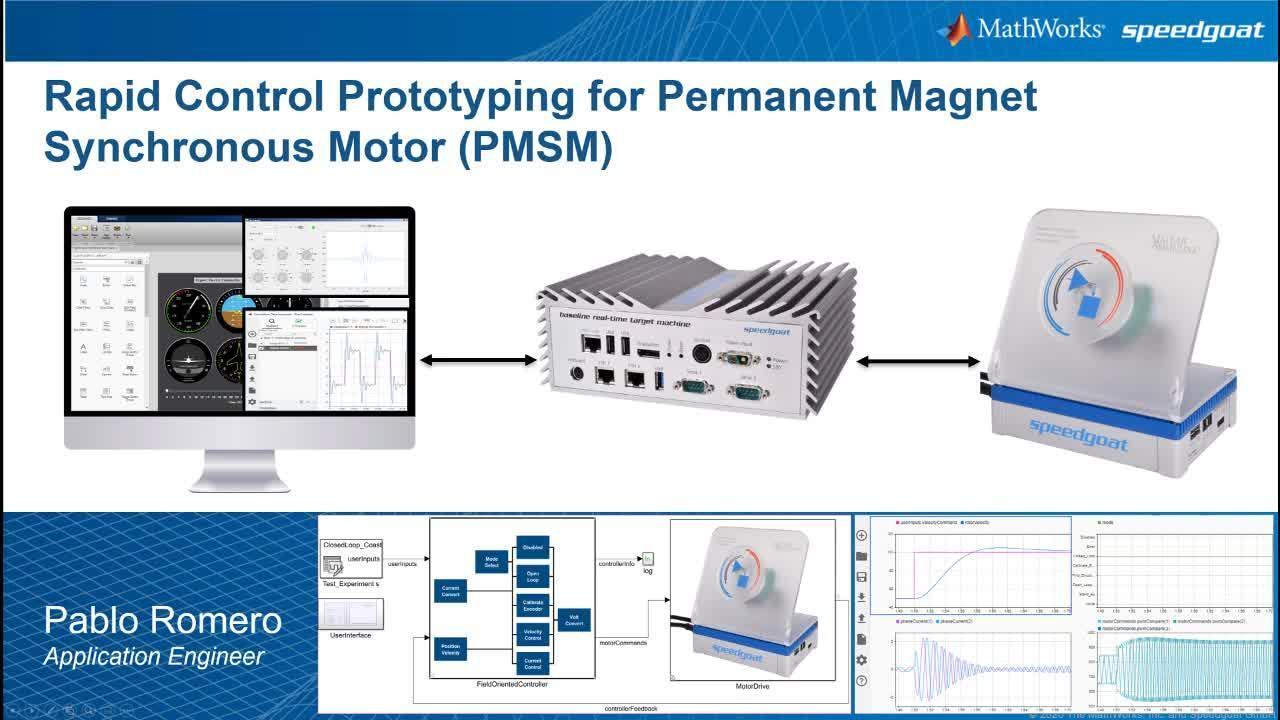
Este webinario le mostrará cómo desarrollar y probar los algoritmos de control de campo orientado (FOC) para un PMSM que opera a una frecuencia de conmutación de 20kHz. Los ingenieros de MathWorks le mostrarán cómo pasar de los algoritmos de control desarrollados en Simulink a la realización de Prototipado Rápido de Control (RCP) utilizando Simulink Real-Time en una máquina en tiempo real de Speedgoat. Aprenderá a preparar los algoritmos de control para las pruebas en tiempo real, a generar código y a cargarlo en la máquina en tiempo real de Speedgoat, a interactuar con el motor y el inversor desde Simulink y a importar los resultados de las pruebas a MATLAB para su análisis.
Aspectos destacados
En este webinario, aprenderá cómo:
- Revisar el funcionamiento de los algoritmos de control de motores de lazo cerrado en Simulink
- Desplegar y probar el algoritmo de control en tiempo real en el hardware de Speedgoat
- Conectar e interactuar con el motor y el hardware del inversor desde Simulink
- Estimar los parámetros de la planta utilizando los datos recogidos del motor
- Capturar las medidas y ajustar los parámetros mientras la prueba se realiza en tiempo real
- Automatizar las pruebas en tiempo real con Simulink Test
Acerca del presentador o presentadores
Pablo Romero Cumbreras es ingeniero de aplicación en MathWorks especializado en sistemas de tiempo real, verificación y validación, y modelado físico. Previamente ha trabajado en el grupo BMW desarrollando modelos de dinámica de vehículo, y en Airbus Defence and Space validando leyes de control de vuelo. Es titulado superior en ingeniería aeronáutica por la Universidad Politécnica de Madrid y realizó su proyecto fin de carrera en la Universidad Técnica de Múnich.
Grabados: 21 oct 2020
Productos relacionados
Producto destacado
Simulink Real-Time










Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: United States.
También puede seleccionar uno de estos países/idiomas:
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)