collisionVHACD
Descomponga la malla en mallas de colisión convexas usando V-HACD
Desde R2023b
Sintaxis
Descripción
convexCollMeshes = collisionVHACD(sourceMesh)
convexCollMeshes = collisionVHACD(sourceMesh,options)
[ devuelve información sobre la descomposición, además de las mallas de colisión convexas descompuestas, utilizando cualquier combinación de argumentos de entrada de sintaxis anteriores.convexCollMeshes,info] = collisionVHACD(___)
Ejemplos
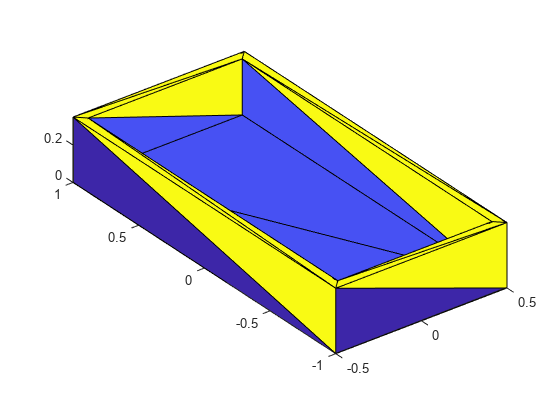
Cargue un archivo STL que contenga una triangulación de contenedores rectangulares y luego visualice la triangulación de contenedores.
meshTri = stlread("bin.stl"); trisurf(meshTri) axis equal
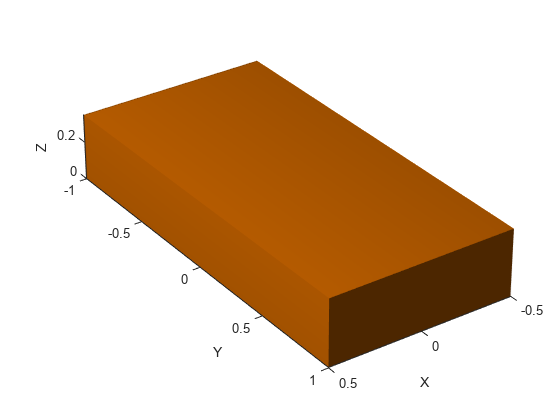
Cree una malla de colisión utilizando los puntos de la triangulación del contenedor y luego visualice la malla. Tenga en cuenta que, cuando se aproxima la triangulación del bin como una malla de colisión, el objeto collisionMesh utiliza la envoltura convexa de la triangulación del bin para aproximarse al bin. Como resultado, la malla de colisión es convexa, a diferencia de la triangulación bin no convexa. El objeto collisionMesh hace esto porque la verificación de colisiones es más eficiente con mallas convexas. Sin embargo, esta aproximación convexa no es ideal para contenedores porque los robots pueden manipular contenedores u objetos dentro de los contenedores.
meshColl = collisionMesh(meshTri.Points); [~,p] = show(meshColl); view(145,30) % Change view so it is easier to view the inside of bin axis equal hold on
Crea una lata de refresco usando un cilindro de colisión y establece la pose de modo que quede en el centro del contenedor. Luego, muéstralo en la malla de colisión convexa.
sodacan = collisionCylinder(0.1,0.4,Pose=trvec2tform([0 0 .3])); show(sodacan);
Configure la caja para que sea transparente para que pueda ver la superposición entre el contenedor y la lata de refresco.
p.FaceAlpha = 0.25;
hold off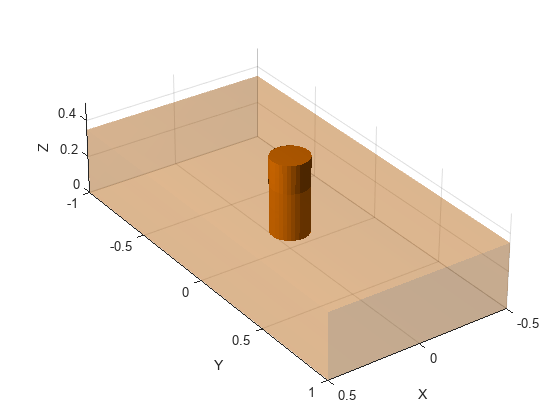
Verifique la colisión entre la lata de refresco y la aproximación convexa del contenedor, y observe que están en colisión.
isCollidingConvex = checkCollision(sodacan,meshColl)
isCollidingConvex = 1
Para obtener una mejor aproximación del contenedor para la verificación de colisiones, descomponga la malla no convexa original en múltiples mallas convexas utilizando la descomposición convexa aproximada jerárquica voxelizada (V-HACD).
Utilice la función collisionVHACD para descomponer la triangulación no convexa original en mallas de colisión convexas. Luego, muestra el contenedor descompuesto con la lata de refresco.
decomposedBin = collisionVHACD(meshTri);
showCollisionArray([decomposedBin {sodacan}]);
view(145,30)
axis equal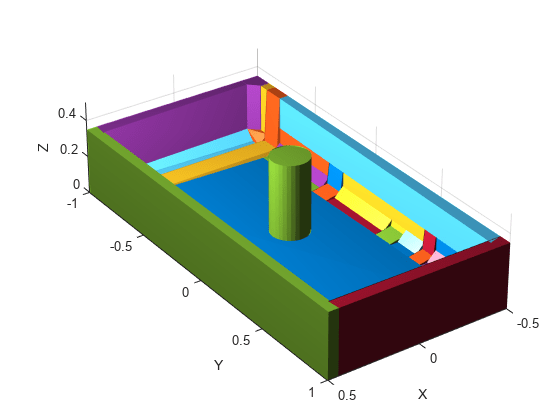
Comprobar colisión con todas las mallas que se aproximan al contenedor. Tenga en cuenta que la lata de refresco no choca con la aproximación no convexa descompuesta del contenedor. Si necesita una descomposición más precisa del bin, puede especificar opciones de solucionador personalizadas utilizando el objeto vhacdOptions.
isColliding = false(1,length(decomposedBin)); for i = 1:length(decomposedBin) isColliding(i) = checkCollision(sodacan,decomposedBin{i}); end isCollidingAll = all(isColliding)
isCollidingAll = logical
0
Cargue el robot Sawyer de Rethink Robotics.
robot = loadrobot("rethinkSawyer",DataFormat="row")
robot =
rigidBodyTree with properties:
NumBodies: 20
Bodies: {1×20 cell}
Base: [1×1 rigidBody]
BodyNames: {1×20 cell}
BaseName: 'base'
Gravity: [0 0 0]
DataFormat: 'row'
FrameNames: {1×21 cell}
Muestre el robot solo con las mallas visuales y muestre el robot solo con las mallas de colisión. Utilice una vista vertical para que la diferencia entre los brazos sea más clara.
tiledlayout(1,2) sgtitle("Rethink Robotics Sawyer") nexttile show(robot,Visuals="on",Collisions="off"); title("Top Down View") axis auto view(90,90) nexttile show(robot,Visuals="off",Collisions="on"); title("Top Down View") axis auto view(90,90)

Tenga en cuenta que cada cuerpo del brazo está representado por una única malla convexa que no representa con precisión los límites físicos del brazo. Para lograr una verificación de colisiones más precisa, es necesario descomponer las mallas visuales del robot. El árbol de cuerpos rígidos almacena los cuerpos rígidos del brazo en los índices 9 a 17.
Primero, cree opciones de solucionador V-HACD para descomposiciones de malla individuales con el número máximo de envolturas convexas establecido en 10.
opts = vhacdOptions("IndividualMesh",MaxNumConvexHulls=10);Luego para cada cuerpo rígido:
Obtenga el cuerpo rígido actual y borre la malla de colisión actual.
Obtenga los datos visuales correspondientes si los hay.
Si hay datos visuales, utilice
collisionVHACD(Robotics System Toolbox) con las opciones de solucionador personalizadas para descomponer la triangulación de los datos visuales en una matriz de mallas de colisión.Agregue cada malla de colisión del arreglo de mallas de colisión al cuerpo rígido.
for bodyIdxToReplace = 9:17 % 1. Get current body and clear collision mesh currBody = robot.Bodies{bodyIdxToReplace}; clearCollision(currBody); % 2. Get Corresponding visual data vizData = getVisual(robot.Bodies{bodyIdxToReplace}); % 3. If visual data, decompose visual data if ~isempty(vizData) collisionArray = collisionVHACD(vizData(1).Triangulation,opts); % 4. Add each collision mesh to the rigid body for j = 1:numel(collisionArray) addCollision(currBody,collisionArray{j}); end end end
Muestre las mallas de colisión originales del brazo del robot junto a la malla de colisión actualizada del brazo.
tiledlayout(1,2); sgtitle("Rethink Robotics Sawyer") nexttile robotOriginal = loadrobot("rethinkSawyer",DataFormat="row"); show(robotOriginal,Visuals="off",Collisions="on"); title("Before Decomposition") axis auto view(90,90) nexttile show(robot,Visuals="off",Collisions="on"); title("After Decomposition") view(90,90) axis auto

Tenga en cuenta que en este caso las nuevas mallas de colisión representan el brazo del robot con mayor precisión.
Argumentos de entrada
Argumentos de salida
Referencias
[1] Mammou, Khaled, et al. “Voxelized Hierarchical Approximate Convex Decomposition - V-HACD Version 4.” GitHub, October 24, 2022. https://github.com/kmammou/v-hacd.
Historial de versiones
Introducido en R2023b