dubinsConnection
Tipo de conexión de ruta Dubins
Descripción
El objeto dubinsConnection contiene información para calcular un segmento de ruta dubinsPathSegment para conectar entre poses. Un segmento de la ruta de Dubins conecta dos poses como una secuencia de tres movimientos. Las opciones de movimiento son:
Derecho
Giro a la izquierda con dirección máxima
Giro a la derecha con dirección máxima
Un segmento de ruta de Dubins solo permite el movimiento en dirección de avance.
Utilice este objeto de conexión para definir parámetros para un modelo de movimiento de robot, incluido el radio de giro mínimo y las opciones para los tipos de ruta. Para generar un segmento de ruta entre poses utilizando este tipo de conexión, llame a la función connect.
Creación
Descripción
dubConnObj = dubinsConnection
dubConnObj = dubinsConnection(Name,Value)
Propiedades
Funciones del objeto
connect | Conectar poses para un tipo de conexión determinado |
Ejemplos
Cree un objeto dubinsConnection.
dubConnObj = dubinsConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
Muestra la ruta generada.
show(pathSegObj{1})
Cree un objeto dubinsConnection.
dubConnObj = dubinsConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
pathSegObj = connect(dubConnObj,startPose,goalPose);
Muestra la ruta generada. Observe la dirección de los giros.
show(pathSegObj{1})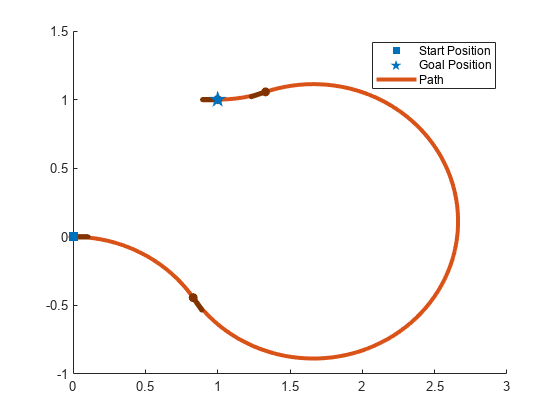
pathSegObj{1}.MotionTypesans = 1×3 cell
{'R'} {'L'} {'R'}
Deshabilite esta secuencia de movimiento específica en un nuevo objeto de conexión. Reduce MinTurningRadius si el robot es más maniobrable. Conecta las poses nuevamente para obtener una ruta diferente.
dubConnObj = dubinsConnection('DisabledPathTypes',{'RLR'}); dubConnObj.MinTurningRadius = 0.5; [pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose); pathSegObj{1}.MotionTypes
ans = 1×3 cell
{'L'} {'S'} {'L'}
show(pathSegObj{1})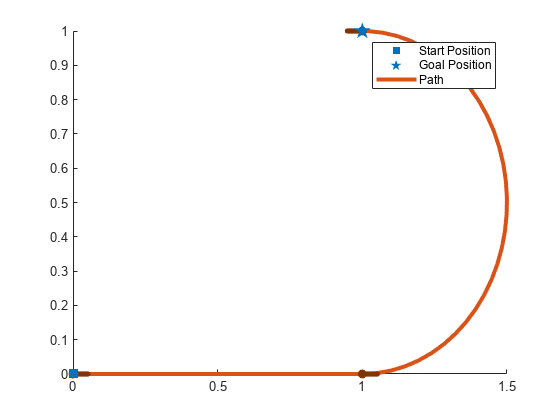
Referencias
[1] Shkel, Andrei M., and Vladimir Lumelsky. "Classification of the Dubins set." Robotics and Autonomous Systems. Vol. 34, No. 4, 2001, pp. 179–202.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b