interpolate
Interpolar poses a lo largo del segmento de ruta
Sintaxis
Descripción
[ también devuelve la dirección del movimiento a lo largo de la ruta para cada sección como un vector de 1s (adelante) y –1s (atrás) utilizando las entradas anteriores.poses,directions] = interpolate(___)
Ejemplos
Cree un objeto dubinsConnection.
dubConnObj = dubinsConnection;
Define las poses de inicio y destino como vectores [x y theta].
startPose = [0 0 0]; goalPose = [1 1 pi];
Calcula un segmento de ruta válido para conectar las poses.
[pathSegObj,pathCosts] = connect(dubConnObj,startPose,goalPose);
Muestra la ruta generada.
show(pathSegObj{1})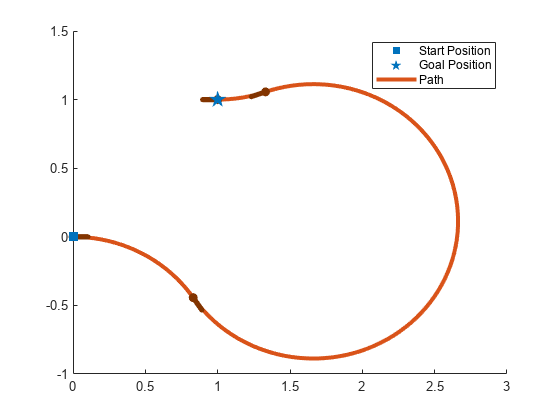
Interpola poses a lo largo de la ruta. Haz una pose cada 0,2 metros, incluidas las transiciones entre giros.
length = pathSegObj{1}.Length;
poses = interpolate(pathSegObj{1},0:0.2:length)poses = 32×3
0 0 0
0.1987 -0.0199 6.0832
0.3894 -0.0789 5.8832
0.5646 -0.1747 5.6832
0.7174 -0.3033 5.4832
0.8309 -0.4436 5.3024
0.8418 -0.4595 5.3216
0.9718 -0.6110 5.5216
1.1293 -0.7337 5.7216
1.3081 -0.8226 5.9216
1.5010 -0.8743 6.1216
1.7003 -0.8866 0.0384
1.8980 -0.8590 0.2384
2.0864 -0.7927 0.4384
2.2578 -0.6904 0.6384
⋮
Utilice la función quiver para trazar estas poses.
quiver(poses(:,1),poses(:,2),cos(poses(:,3)),sin(poses(:,3)),0.5)

Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2019b