edgeResidualErrors
Calcular los errores residuales del borde del gráfico de pose
Descripción
resErrorVec = edgeResidualErrors(poseGraphObj)poseGraph.
Ejemplos
Optimice un gráfico de pose en función de los nodos y las restricciones de los bordes. Recorte el bucle cerrado en función de los errores residuales de sus bordes.
Cargue el conjunto de datos que contiene un gráfico de pose 2D. Inspeccione el objeto poseGraph para ver la cantidad de nodos y cierres de bucle.
load grid-2d-posegraph.mat pg disp(pg)
poseGraph with properties:
NumNodes: 120
NumEdges: 193
NumLoopClosureEdges: 74
LoopClosureEdgeIDs: [120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 … ] (1×74 double)
LandmarkNodeIDs: [1×0 double]
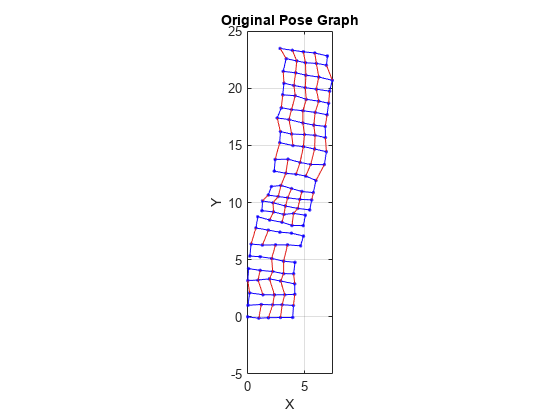
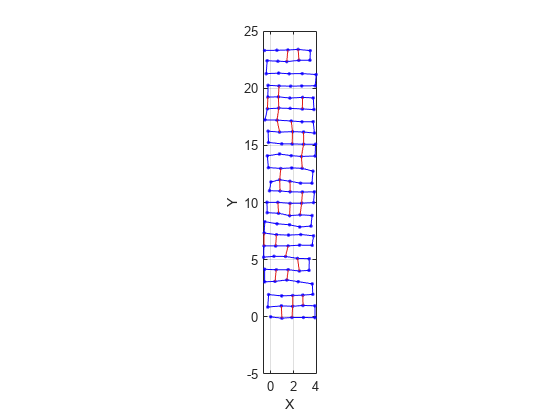
Traza el gráfico de pose con las identificaciones desactivadas. Las líneas rojas indican cierres de bucle identificados en el conjunto de datos. Las poses en el gráfico deben seguir un patrón de cuadrícula, pero muestran evidencia de variación con el tiempo.
show(pg,'IDs','off'); title('Original Pose Graph')
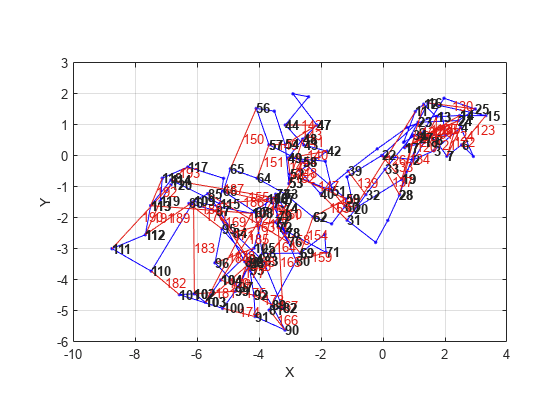
Optimice el gráfico de pose usando la función optimizePoseGraph. De forma predeterminada, esta función utiliza el solucionador "builtin-trust-region". Debido a que el gráfico de pose contiene algunos cierres de bucle incorrectos, el gráfico de pose resultante en realidad no es deseable.
pgOptim = optimizePoseGraph(pg); figure; show(pgOptim);
Observe los errores residuales de los bordes del gráfico de pose original. Los valores de error atípicos grandes al final indican cierres de bucle incorrectos.
resErrorVec = edgeResidualErrors(pg);
plot(resErrorVec);
title('Edge Residual Errors by Edge ID')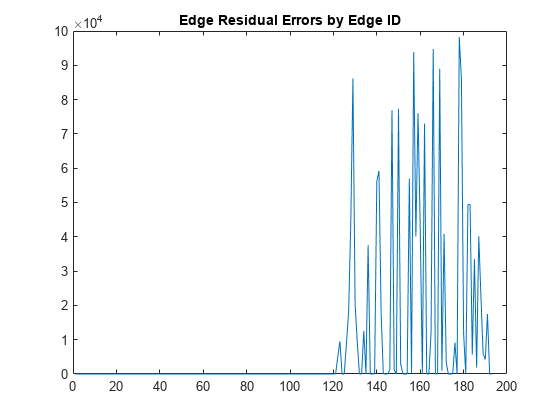
Ciertos cierres de bucle deben recortarse del gráfico de pose en función de su error residual. Utilice la función trimLoopClosures para recortar estos cierres de bucle defectuosos. Establezca el umbral máximo y de truncamiento para los parámetros del recortador. Este umbral se establece en función de la precisión de la medición y debe ajustarse a su sistema.
trimParams.MaxIterations = 100; trimParams.TruncationThreshold = 25; solverOptions = poseGraphSolverOptions;
Utilice la función trimLoopClosures con los parámetros del recortador y las opciones del solucionador.
[pgNew, trimInfo, debugInfo] = trimLoopClosures(pg,trimParams,solverOptions);
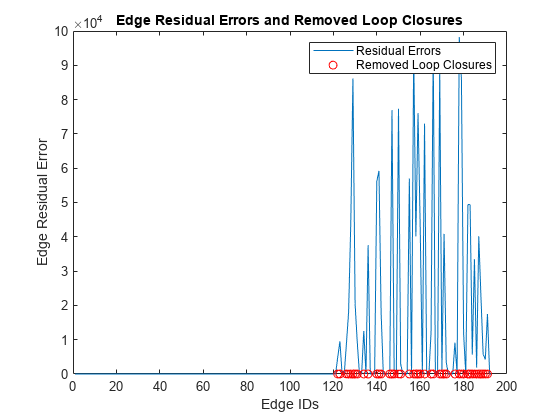
A partir de la salida trimInfo, grafique los cierres de bucle eliminados del gráfico de pose optimizado. Al trazar con el gráfico de errores residuales anterior, puede ver que se eliminaron los grandes cierres de bucles de errores.
removedLCs = trimInfo.LoopClosuresToRemove; hold on plot(removedLCs,zeros(length(removedLCs)),'or') title('Edge Residual Errors and Removed Loop Closures') legend('Residual Errors', 'Removed Loop Closures') xlabel('Edge IDs') ylabel('Edge Residual Error') hold off
Muestre el nuevo gráfico de pose con los cierres de bucle defectuosos recortados.
show(pgNew,"IDs","off");
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2020b