nodeEstimates
Poses de nodos en el gráfico de poses.
Descripción
measurements = nodeEstimates(poseGraph)
measurements = nodeEstimates(poseGraph,nodeIDs)
Ejemplos
Crea un objeto gráfico de pose 2D.
pg = poseGraph;
Agregue poses relativas al gráfico de pose.
addRelativePose(pg,[1 1 pi/2]); addRelativePose(pg,[2 2 pi/3]);
Agregue un nodo de punto de referencia al último nodo de pose en el gráfico de pose.
addPointLandmark(pg,[1 1]); show(pg);
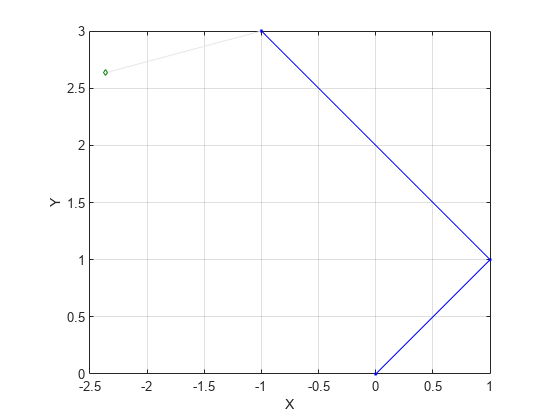
Enumere todas las poses en el gráfico de poses.
nodeEstimates(pg)
ans = 4×3
0 0 0
1.0000 1.0000 1.5708
-1.0000 3.0000 2.6180
-2.3660 2.6340 NaN