addRelativePose
Agregar pose relativa al gráfico de pose
Sintaxis
Descripción
addRelativePose( crea un nodo basado en la entrada poseGraph,measurement)measurement que se conecta al último nodo de pose en el gráfico de pose. Para agregar nodos de referencia, consulte la función addPointLandmark.
addRelativePose( también especifica la matriz de información como parte de la restricción del borde, que representa la incertidumbre de la medición de la pose.poseGraph,measurement,infoMat)
addRelativePose( crea un nuevo nodo de pose y lo conecta al nodo específico especificado por poseGraph,measurement,infoMat,fromNodeID)fromNodeID.
addRelativePose( crea un borde al especificar una medida de pose relativa entre los nodos existentes especificados por poseGraph,measurement,infoMat,fromNodeID,toNodeID)fromNodeID y toNodeID. Este borde se llama cierre de bucle. Si ya existe un cierre de bucle, la función agrega la nueva medición. Al llamar a la función optimizePoseGraph se combinan múltiples mediciones adjuntas en un único borde. Esta sintaxis no admite la adición de aristas a un nodo de referencia.
Ejemplos
Este ejemplo muestra cómo identificar y eliminar cierres de bucles espurios del gráfico de pose. Para hacer esto, puede modificar la pose relativa de un borde de cierre de bucle e intentar optimizar el gráfico de pose con y sin eliminar el cierre de bucle espurio automático y comparar los resultados.
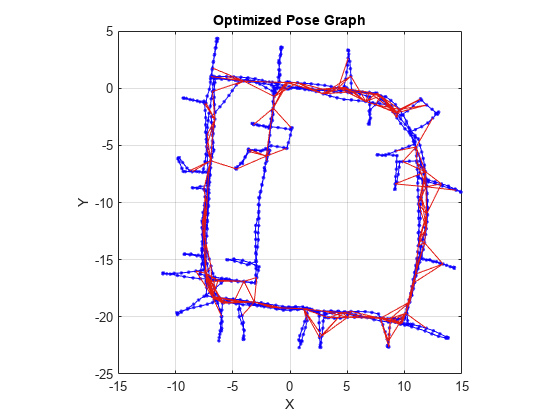
Cargue el Conjunto de datos de Intel Research Lab que contiene un gráfico de pose 2-D. Optimiza el gráfico de pose. Traza el gráfico de pose con las identificaciones desactivadas. Las líneas rojas indican cierres de bucle identificados en el conjunto de datos.
load intel-2d-posegraph.mat pg optimizedPG = optimizePoseGraph(pg); show(optimizedPG,IDs="off"); title("Optimized Pose Graph")
Modifique la postura relativa del borde de cierre del bucle 1386 a algunos valores aleatorios.
loopclosureId = 1386; nodePair = edgeNodePairs(optimizedPG,loopclosureId); [relPose,infoMat] = edgeConstraints(optimizedPG,loopclosureId); relPose(2) = -5; relPose(3) = 1.5; addRelativePose(optimizedPG,relPose,infoMat,nodePair(1),nodePair(2));
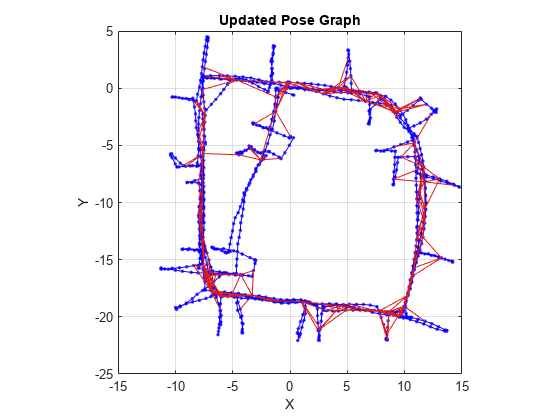
Optimice el gráfico de pose sin recortar el cierre automático del bucle. Trace el gráfico de pose optimizado para ver el ajuste deficiente de los nodos con cierres de bucle.
[updatedPG,solutionInfo] = optimizePoseGraph(optimizedPG); show(updatedPG,IDs="off"); title("Updated Pose Graph")
Ciertos cierres de bucle deben recortarse del gráfico de pose. Utilice la función trimLoopClosures para recortar estos cierres de bucle defectuosos. Establezca el umbral de truncamiento y las iteraciones máximas para los parámetros del recortador.
trimParams = struct("TruncationThreshold",0.5,"MaxIterations",100);
Generar opciones de solver .
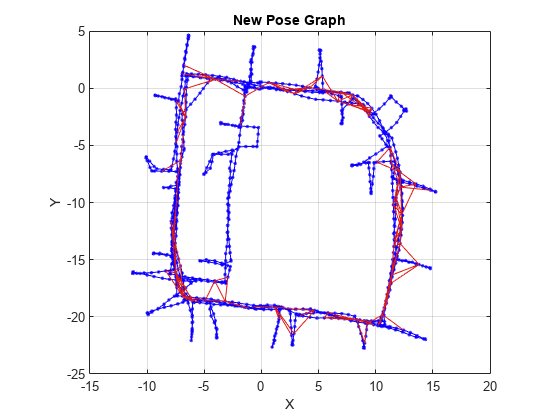
solverOptions = poseGraphSolverOptions("g2o-levenberg-marquardt");Utilice la función trimLoopClosures con los parámetros del recortador y las opciones del solucionador. Trace el nuevo gráfico de pose para ver que se eliminaron los cierres de bucle incorrectos.
[newPG,trimInfo] = trimLoopClosures(updatedPG,trimParams,solverOptions); show(newPG,IDs="off"); title("New Pose Graph")
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2019b