stateEstimatorPF
Crear estimador de estado de filtro de partículas
Descripción
El objeto stateEstimatorPF es un estimador de estado bayesiano recursivo que utiliza partículas discretas para aproximar la distribución posterior del estado estimado.
El algoritmo del filtro de partículas calcula la estimación del estado de forma recursiva e implica dos pasos: predicción y corrección. El paso de predicción utiliza el estado anterior para predecir el estado actual en función de un modelo de sistema determinado. El paso de corrección utiliza la medición actual del sensor para corregir la estimación del estado. El algoritmo redistribuye periódicamente, o vuelve a muestrear, las partículas en el espacio de estados para que coincidan con la distribución posterior del estado estimado.
El estado estimado consta de variables de estado. Cada partícula representa una hipótesis de estado discreta de estas variables de estado. El conjunto de todas las partículas se utiliza para ayudar a determinar la estimación del estado final.
Puede aplicar el filtro de partículas a modelos de sistemas no lineales arbitrarios. El ruido de proceso y de medición puede seguir distribuciones arbitrarias no gaussianas.
Para obtener más información sobre el flujo de trabajo del filtro de partículas y la configuración de parámetros específicos, consulte:
Creación
Sintaxis
Descripción
pf = stateEstimatorPFinitialize para inicializar las partículas con una media y covarianza conocidas o partículas distribuidas uniformemente dentro de límites definidos. Para personalizar el sistema del filtro de partículas y los modelos de medición, modifique las propiedades StateTransitionFcn y MeasurementLikelihoodFcn.
Después de crear el objeto, utilice initialize para inicializar las propiedades NumStateVariables y NumParticles. La función initialize establece estas dos propiedades en función de sus entradas.
Propiedades
Funciones del objeto
initialize | Inicializar el estado del filtro de partículas. |
getStateEstimate | Extraiga la mejor estimación del estado y la covarianza de las partículas |
predict | Predecir el estado del robot en el próximo paso |
correct | Ajustar la estimación del estado según la medición del sensor |
Ejemplos
Cree un objeto stateEstimatorPF y ejecute un paso de predicción y corrección para la estimación del estado. El filtro de partículas proporciona una estimación del estado previsto basada en el valor de retorno de StateTransitionFcn. Luego corrige el estado en función de una medición determinada y el valor de retorno de MeasurementLikelihoodFcn.
Cree un filtro de partículas con los tres estados predeterminados.
pf = stateEstimatorPF
pf =
stateEstimatorPF with properties:
NumStateVariables: 3
NumParticles: 1000
StateTransitionFcn: @nav.algs.gaussianMotion
MeasurementLikelihoodFcn: @nav.algs.fullStateMeasurement
IsStateVariableCircular: [0 0 0]
ResamplingPolicy: [1×1 resamplingPolicyPF]
ResamplingMethod: 'multinomial'
StateEstimationMethod: 'mean'
StateOrientation: 'row'
Particles: [1000×3 double]
Weights: [1000×1 double]
State: 'Use the getStateEstimate function to see the value.'
StateCovariance: 'Use the getStateEstimate function to see the value.'
Especifique el método de estimación del estado medio y el método de remuestreo sistemático.
pf.StateEstimationMethod = 'mean'; pf.ResamplingMethod = 'systematic';
Inicialice el filtro de partículas en el estado [4 1 9] con covarianza unitaria (eye(3)). Utilice 5000 partículas.
initialize(pf,5000,[4 1 9],eye(3));
Suponiendo una medición [4.2 0.9 9], ejecute un paso de predicción y uno correcto.
[statePredicted,stateCov] = predict(pf); [stateCorrected,stateCov] = correct(pf,[4.2 0.9 9]);
Obtenga la mejor estimación de estado basada en el algoritmo StateEstimationMethod.
stateEst = getStateEstimate(pf)
stateEst = 1×3
4.1562 0.9185 9.0202
Utilice el objeto stateEstimatorPF para rastrear un robot mientras se mueve en un espacio 2D. A la posición medida se le agrega ruido aleatorio. Utilizando predict y correct, realice un seguimiento del robot en función de la medición y de un modelo de movimiento supuesto.
Inicialice el filtro de partículas y especifique la función de transición de estado predeterminada, la función de probabilidad de medición y la política de remuestreo.
pf = stateEstimatorPF; pf.StateEstimationMethod = 'mean'; pf.ResamplingMethod = 'systematic';
Muestre 1000 partículas con una posición inicial de [0 0] y covarianza unitaria.
initialize(pf,1000,[0 0],eye(2));
Antes de la estimación, defina una trayectoria de onda sinusoidal para que la siga el punto. Cree un arreglo para almacenar la posición prevista y estimada. Definir la amplitud del ruido.
t = 0:0.1:4*pi; dot = [t; sin(t)]'; robotPred = zeros(length(t),2); robotCorrected = zeros(length(t),2); noise = 0.1;
Inicie el ciclo para predecir y corregir la posición estimada en función de las mediciones. El remuestreo de partículas se produce en función de la propiedad ResamplingPolicy. El robot se mueve basándose en una función de onda sinusoidal con ruido aleatorio agregado a la medición.
for i = 1:length(t) % Predict next position. Resample particles if necessary. [robotPred(i,:),robotCov] = predict(pf); % Generate dot measurement with random noise. This is % equivalent to the observation step. measurement(i,:) = dot(i,:) + noise*(rand([1 2])-noise/2); % Correct position based on the given measurement to get best estimation. % Actual dot position is not used. Store corrected position in data array. [robotCorrected(i,:),robotCov] = correct(pf,measurement(i,:)); end
Trazar la ruta real versus la posición estimada. Los resultados reales pueden variar debido a la aleatoriedad de las distribuciones de partículas.
plot(dot(:,1),dot(:,2),robotCorrected(:,1),robotCorrected(:,2),'or') xlim([0 t(end)]) ylim([-1 1]) legend('Actual position','Estimated position') grid on
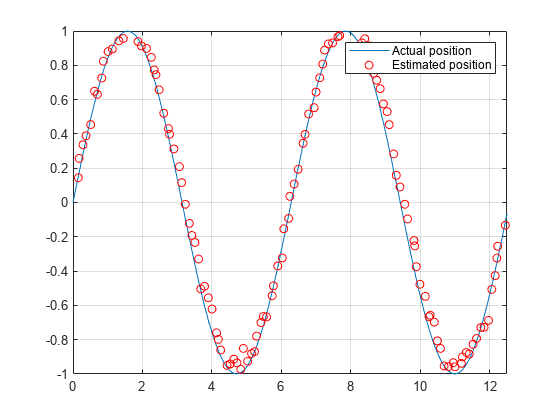
La figura muestra qué tan cerca coincide el estado estimado con la posición real del robot. Intente ajustar el número de partículas o especificar una posición inicial y una covarianza diferentes para ver cómo afecta el seguimiento a lo largo del tiempo.
Referencias
[1] Arulampalam, M.S., S. Maskell, N. Gordon, and T. Clapp. "A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking." IEEE Transactions on Signal Processing. Vol. 50, No. 2, Feb 2002, pp. 174-188.
[2] Chen, Z. "Bayesian Filtering: From Kalman Filters to Particle Filters, and Beyond." Statistics. Vol. 182, No. 1, 2003, pp. 1-69.
Capacidades ampliadas
Historial de versiones
Introducido en R2016aConsulte también
resamplingPolicyPF | initialize | getStateEstimate | predict | correct