connect
Conectar los estados inicial y terminal de Frenet
Sintaxis
Descripción
frenetTrajectory = connect(connectorFrenet,initialState,terminalState,timeSpan)
[___, devuelve las trayectorias en coordenadas globales además de todos los argumentos en la sintaxis anterior.globalTrajectory] = connect(___)
Ejemplos
Generar trayectorias alternativas para una ruta de referencia utilizando coordenadas de Frenet. Especifique diferentes estados iniciales y terminales para sus trayectorias. Ajusta tus estados en función de las trayectorias generadas.
Genere una ruta de referencia a partir de un conjunto de puntos de referencia. Crea un objeto trajectoryGeneratorFrenet a partir de la ruta de referencia.
waypoints = [0 0; ... 50 20; ... 100 0; ... 150 10]; refPath = referencePathFrenet(waypoints); connector = trajectoryGeneratorFrenet(refPath);
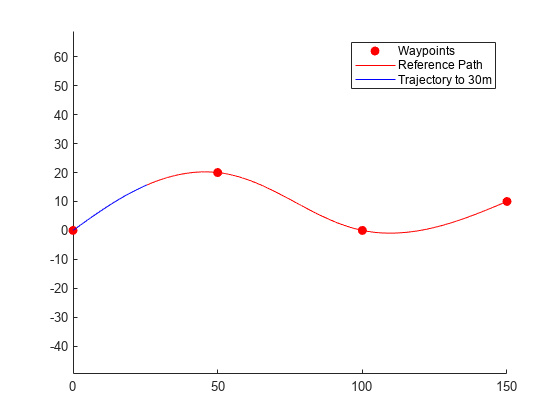
Genere una trayectoria de cinco segundos entre el origen de la ruta y un punto a 30 m de la ruta como afirma Frenet.
initState = [0 0 0 0 0 0]; % [S ds ddS L dL ddL] termState = [30 0 0 0 0 0]; % [S ds ddS L dL ddL] [~,trajGlobal] = connect(connector,initState,termState,5);
Muestra la trayectoria en coordenadas globales.
show(refPath); hold on axis equal plot(trajGlobal.Trajectory(:,1),trajGlobal.Trajectory(:,2),'b') legend(["Waypoints","Reference Path","Trajectory to 30m"])
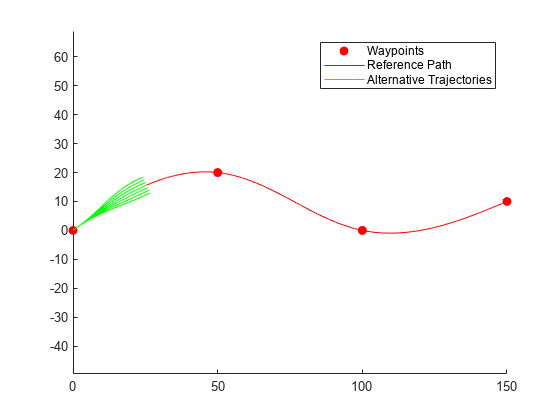
Cree una matriz de estados terminales con desviaciones laterales entre –3 my 3 m. Genera trayectorias que cubren la misma longitud de arco en 10 segundos, pero se desvían lateralmente de la ruta de referencia. Muestra las nuevas rutas alternativas.
termStateDeviated = termState + ([-3:3]' * [0 0 0 1 0 0]); [~,trajGlobal] = connect(connector,initState,termStateDeviated,10); clf show(refPath); hold on axis equal for i = 1:length(trajGlobal) plot(trajGlobal(i).Trajectory(:,1),trajGlobal(i).Trajectory(:,2),'g') end legend(["Waypoints","Reference Path","Alternative Trajectories"]) hold off
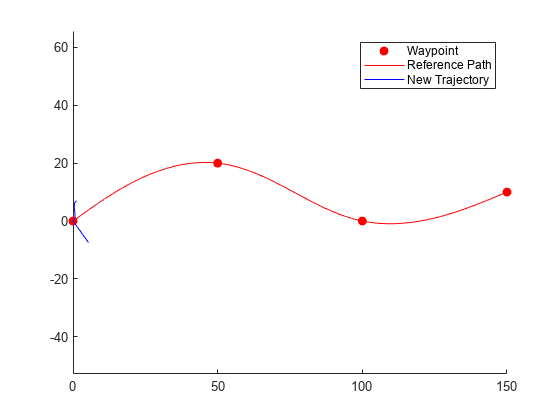
Especifique un nuevo estado terminal para generar una nueva trayectoria. Esta trayectoria no es deseable porque requiere un movimiento inverso para alcanzar una velocidad longitudinal de 10 m/s.
newTermState = [5 10 0 5 0 0]; [~,newTrajGlobal] = connect(connector,initState,newTermState,3); clf show(refPath); hold on axis equal plot(newTrajGlobal.Trajectory(:,1),newTrajGlobal.Trajectory(:,2),'b'); legend(["Waypoint","Reference Path","New Trajectory"]) hold off
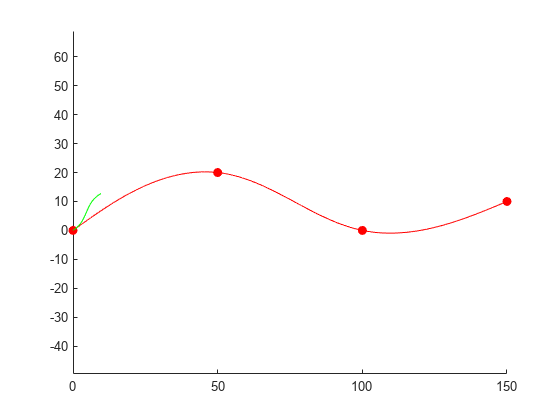
Relaje la restricción en el estado longitudinal especificando una longitud de arco de NaN. Genera y muestra la trayectoria nuevamente. La nueva posición muestra una buena trayectoria alternativa que se desvía de la trayectoria de referencia.
relaxedTermState = [NaN 10 0 5 0 0]; [~,trajGlobalRelaxed] = connect(connector,initState,relaxedTermState,3); clf show(refPath); hold on axis equal plot(trajGlobalRelaxed.Trajectory(:,1),trajGlobalRelaxed.Trajectory(:,2),'g'); hold off
Argumentos de entrada
Argumentos de salida
Trayectorias de Frenet entre todos los estados inicial y final, devueltas como un arreglo de estructura con estos campos:
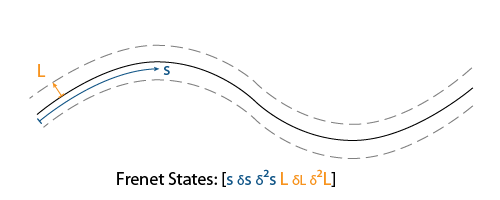
Trajectory— matriz numérica n por 6. Cada fila de la matriz es un conjunto de coordenadas de Frenet para el estado inicial de una trayectoria en la forma[S dS ddS L dL ddL].Time— Vector de escalares positivos de0atimeSpanen segundos.
Esta función admite conexiones de trayectorias por pares de 1 a n, n a 1 o n a n según la cantidad de filas de initialState y terminalState.
Trayectorias globales entre todos los estados inicial y final, devueltas como estructura o arreglo de estructura con campos:
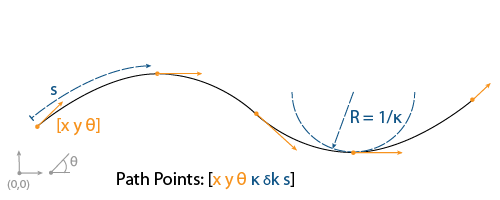
Trajectory— matriz numérica n por 6. Cada fila de la matriz es un conjunto de estados globales con la forma[x y theta kappa v a].Time— Vector de escalares positivos de0atimeSpanen segundos.
Esta función admite conexiones de trayectorias por pares de 1 a n, n a 1 o n a n según la cantidad de filas de initialState y terminalState.
Capacidades ampliadas
Historial de versiones
Introducido en R2020b