fsolve
Resolver un sistema de ecuaciones no lineales
Sintaxis
Descripción
Solver de sistema no lineal
Resuelve un problema especificado por
F(x) = 0
para x, donde F (x) es una función que devuelve un valor de vector.
x es un vector o una matriz; consulte Argumentos de matriz.
x = fsolve(fun,x0)x0 e intenta resolver las ecuaciones fun(x) = 0, un arreglo de ceros.
Nota
Pasar parámetros adicionales explica cómo pasar parámetros adicionales a la función vectorial fun(x), si fuera necesario. Consulte Resolver una ecuación parametrizada.
x = fsolve(fun,x0,options)options. Utilice optimoptions para configurar estas opciones.
Ejemplos
Este ejemplo muestra cómo resolver dos ecuaciones no lineales en dos variables. Las ecuaciones son
Convierta las ecuaciones al formato .
La función root2d.m, que está disponible cuando se ejecuta este ejemplo, calcula los valores.
type root2d.mfunction F = root2d(x) F(1) = exp(-exp(-(x(1)+x(2)))) - x(2)*(1+x(1)^2); F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
Resuelva el sistema de ecuaciones comenzando en el punto [0,0].
fun = @root2d; x0 = [0,0]; x = fsolve(fun,x0)
Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient.
x = 1×2
0.3532 0.6061
Examine el proceso de resolución para un sistema no lineal.
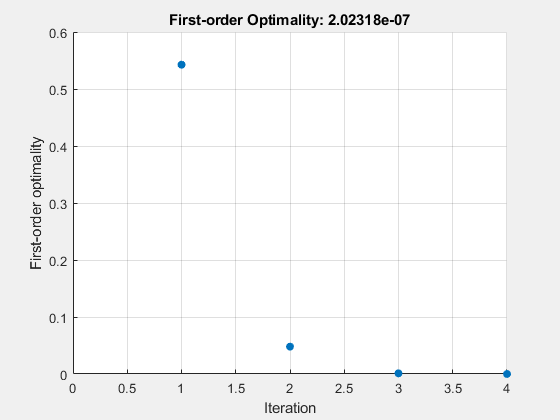
Establezca las opciones de forma que no cuente con visualización y cuente con una función de gráfica que muestre la optimalidad de primer orden, que debería converger a 0 a medida que el algoritmo itera.
options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);
Las ecuaciones del sistema no lineal son
Convierta las ecuaciones al formato .
La función root2d calcula el lado izquierdo de estas dos ecuaciones.
type root2d.mfunction F = root2d(x) F(1) = exp(-exp(-(x(1)+x(2)))) - x(2)*(1+x(1)^2); F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
Resuelva el sistema no lineal comenzando por el punto [0,0] y observe el proceso de resolución.
fun = @root2d; x0 = [0,0]; x = fsolve(fun,x0,options)
x = 1×2
0.3532 0.6061
Puede parametrizar ecuaciones tal y como se describe en la sección Pasar parámetros adicionales. Por ejemplo, la función auxiliar paramfun al final de este ejemplo crea el siguiente sistema de ecuación parametrizado por :
Para resolver el sistema para un valor particular, en este caso , establezca en el área de trabajo y cree una función anónima en x desde paramfun.
c = -1; fun = @(x)paramfun(x,c);
Resuelva el sistema comenzando por el punto x0 = [0 1].
x0 = [0 1]; x = fsolve(fun,x0)
Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient.
x = 1×2
0.1976 0.4255
Para la resolución con un valor diferente de , introduzca en el área de trabajo y cree la función fun de nuevo para que tenga el nuevo valor .
c = -2;
fun = @(x)paramfun(x,c); % fun now has the new c value
x = fsolve(fun,x0)Equation solved. fsolve completed because the vector of function values is near zero as measured by the value of the function tolerance, and the problem appears regular as measured by the gradient.
x = 1×2
0.1788 0.3418
Función auxiliar
Este código crea la función auxiliar paramfun.
function F = paramfun(x,c) F = [ 2*x(1) + x(2) - exp(c*x(1)) -x(1) + 2*x(2) - exp(c*x(2))]; end
Cree una estructura de problema para fsolve y resuelva el problema.
Resuelva el mismo problema que en Resolución con opciones no predeterminadas, pero formule el problema utilizando una estructura de problema.
Establezca las opciones para el problema de forma que no cuente con visualización y cuente con una función de gráfica que muestre la optimalidad de primer orden, que debería converger a 0 a medida que el algoritmo itera.
problem.options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);
Las ecuaciones del sistema no lineal son
Convierta las ecuaciones al formato .
La función root2d calcula el lado izquierdo de estas dos ecuaciones.
type root2dfunction F = root2d(x) F(1) = exp(-exp(-(x(1)+x(2)))) - x(2)*(1+x(1)^2); F(2) = x(1)*cos(x(2)) + x(2)*sin(x(1)) - 0.5;
Cree los campos restantes en la estructura de problema.
problem.objective = @root2d;
problem.x0 = [0,0];
problem.solver = 'fsolve';Resuelva el problema.
x = fsolve(problem)

x = 1×2
0.3532 0.6061
Este ejemplo devuelve la visualización iterativa que muestra el proceso de resolución para el sistema de dos ecuaciones y dos incógnitas
Reescriba las ecuaciones con el formato :
Comience a buscar una solución en x0 = [-5 -5].
En primer lugar, escriba una función que calcule F, los valores de las ecuaciones en x.
F = @(x) [2*x(1) - x(2) - exp(-x(1));
-x(1) + 2*x(2) - exp(-x(2))];Cree el punto inicial x0.
x0 = [-5;-5];
Establezca opciones para devolver una visualización iterativa.
options = optimoptions('fsolve','Display','iter');
Resuelva las ecuaciones.
[x,fval] = fsolve(F,x0,options)
Norm of First-order Trust-region
Iteration Func-count ||f(x)||^2 step optimality radius
0 3 47071.2 2.29e+04 1
1 6 12003.4 1 5.75e+03 1
2 9 3147.02 1 1.47e+03 1
3 12 854.452 1 388 1
4 15 239.527 1 107 1
5 18 67.0412 1 30.8 1
6 21 16.7042 1 9.05 1
7 24 2.42788 1 2.26 1
8 27 0.032658 0.759511 0.206 2.5
9 30 7.03149e-06 0.111927 0.00294 2.5
10 33 3.29525e-13 0.00169132 6.36e-07 2.5
Equation solved.
fsolve completed because the vector of function values is near zero
as measured by the value of the function tolerance, and
the problem appears regular as measured by the gradient.
x = 2×1
0.5671
0.5671
fval = 2×1
10-6 ×
-0.4059
-0.4059
La visualización iterativa muestra f(x), que es el cuadrado de la norma de la función F(x). Este valor se reduce casi a cero a medida que se realizan las iteraciones. La medida de optimalidad de primer orden también se reduce casi a cero a medida que se realizan las iteraciones. Estas entradas muestran la convergencia de las iteraciones a una solución. Para saber cuál es el significado de las otras entradas, consulte Visualización iterativa.
La salida fval proporciona el valor de función F(x), que debería ser cero en una solución (dentro de la tolerancia FunctionTolerance).
Encuentre una matriz que satisfaga
,
comenzando en el punto x0 = [1,1;1,1]. Cree una función anónima que calcule la ecuación de matriz y cree el punto x0.
fun = @(x)x*x*x - [1,2;3,4]; x0 = ones(2);
Establezca las opciones de forma que no cuente con visualización.
options = optimoptions('fsolve','Display','off');
Examine las salidas de fsolve para ver la calidad de la solución y el proceso.
[x,fval,exitflag,output] = fsolve(fun,x0,options)
x = 2×2
-0.1291 0.8602
1.2903 1.1612
fval = 2×2
10-9 ×
-0.2742 0.1258
0.1876 -0.0864
exitflag = 1
output = struct with fields:
iterations: 11
funcCount: 52
algorithm: 'trust-region-dogleg'
firstorderopt: 4.0197e-10
message: 'Equation solved....'
El valor de indicador de salida 1 muestra que la solución es fiable. Para verificarlo de forma manual, calcule el valor residual (suma de los cuadrados de fval) para comprobar lo cerca que está de cero.
sum(sum(fval.*fval))
ans = 1.3367e-19
El valor residual pequeño confirma que x es una solución.
En la estructura de output puede ver cuántas iteraciones y evaluaciones de función ha realizado fsolve para encontrar la solución.
Argumentos de entrada
Argumentos de salida
Limitaciones
La función que se desea resolver debe ser continua.
Cuando se resuelve correctamente,
fsolvesolo proporciona una raíz.El método predeterminado trust-region dogleg solo puede utilizarse cuando el sistema de ecuaciones es cuadrado, es decir, el número de ecuaciones es igual al número de incógnitas. Para el método de Levenberg-Marquardt, no es necesario que el sistema de ecuaciones sea cuadrado.
Sugerencias
Para problemas grandes, es decir, aquellos con miles de variables o incluso más, puede ahorrar memoria (y posiblemente tiempo) estableciendo la opción
Algorithmen'trust-region'y la opciónSubproblemAlgorithmen'cg'.
Algoritmos
Los métodos Levenberg-Marquardt y trust-region se basan en los algoritmos de mínimos cuadrados no lineales que también se utilizan en lsqnonlin. Utilice uno de estos métodos si es posible que el sistema no tenga un cero. El algoritmo sigue devolviendo un punto donde el valor residual es pequeño. No obstante, si la matriz jacobiana del sistema es singular, el algoritmo puede converger a un punto que no sea una solución del sistema de ecuaciones (consulte Limitaciones).
De forma predeterminada,
fsolveescoge el algoritmo trust-region dogleg. El algoritmo es una variante del método dogleg de Powell descrito en [8]. Es similar al algoritmo implementado en [7]. Consulte Algoritmo trust-region-dogleg.El algoritmo trust-region es un método de región de confianza de subespacio y se basa en el método de Newton de reflejo de punto interior descrito en [1] y [2]. Cada iteración implica la solución aproximada de un sistema lineal amplio utilizando el método de gradientes conjugados precondicionados (PCG). Consulte Algoritmo trust-region.
El método de Levenberg-Marquardt se describe en las referencias [4], [5] y [6]. Consulte Método de Levenberg-Marquardt.
Funcionalidad alternativa
App
La tarea Optimize de Live Editor proporciona una interfaz visual para fsolve.
Referencias
[1] Coleman, T.F. and Y. Li, “An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds,” SIAM Journal on Optimization, Vol. 6, pp. 418-445, 1996.
[2] Coleman, T.F. and Y. Li, “On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds,” Mathematical Programming, Vol. 67, Number 2, pp. 189-224, 1994.
[3] Dennis, J. E. Jr., “Nonlinear Least-Squares,” State of the Art in Numerical Analysis, ed. D. Jacobs, Academic Press, pp. 269-312.
[4] Levenberg, K., “A Method for the Solution of Certain Problems in Least-Squares,” Quarterly Applied Mathematics 2, pp. 164-168, 1944.
[5] Marquardt, D., “An Algorithm for Least-squares Estimation of Nonlinear Parameters,” SIAM Journal Applied Mathematics, Vol. 11, pp. 431-441, 1963.
[6] Moré, J. J., “The Levenberg-Marquardt Algorithm: Implementation and Theory,” Numerical Analysis, ed. G. A. Watson, Lecture Notes in Mathematics 630, Springer Verlag, pp. 105-116, 1977.
[7] Moré, J. J., B. S. Garbow, and K. E. Hillstrom, User Guide for MINPACK 1, Argonne National Laboratory, Rept. ANL-80-74, 1980.
[8] Powell, M. J. D., “A Fortran Subroutine for Solving Systems of Nonlinear Algebraic Equations,” Numerical Methods for Nonlinear Algebraic Equations, P. Rabinowitz, ed., Ch.7, 1970.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006aConsulte también
fzero | lsqcurvefit | lsqnonlin | optimoptions | Optimize
Temas
- Resolver un sistema no lineal, sin y con matrices jacobianas
- Large Sparse System of Nonlinear Equations with Jacobian
- Large System of Nonlinear Equations with Jacobian Sparsity Pattern
- Sistemas no lineales con restricciones
- Configuración de problema de optimización basada en solvers
- Algoritmos de resolución de ecuaciones