Designing Line Following Algorithms | Student Competition: Mobile Robotics Training, Part 3
From the series: Student Competition: Mobile Robotics Training
Learn how to design line following algorithms for a mobile robot.
You will understand how line sensors work and their characteristics, like the output value range, and to use a single sensor to track the edge of a line. You will then learn to design on-off and PID-based line following algorithms in Simulink®, and observe the difference in the results between the two.
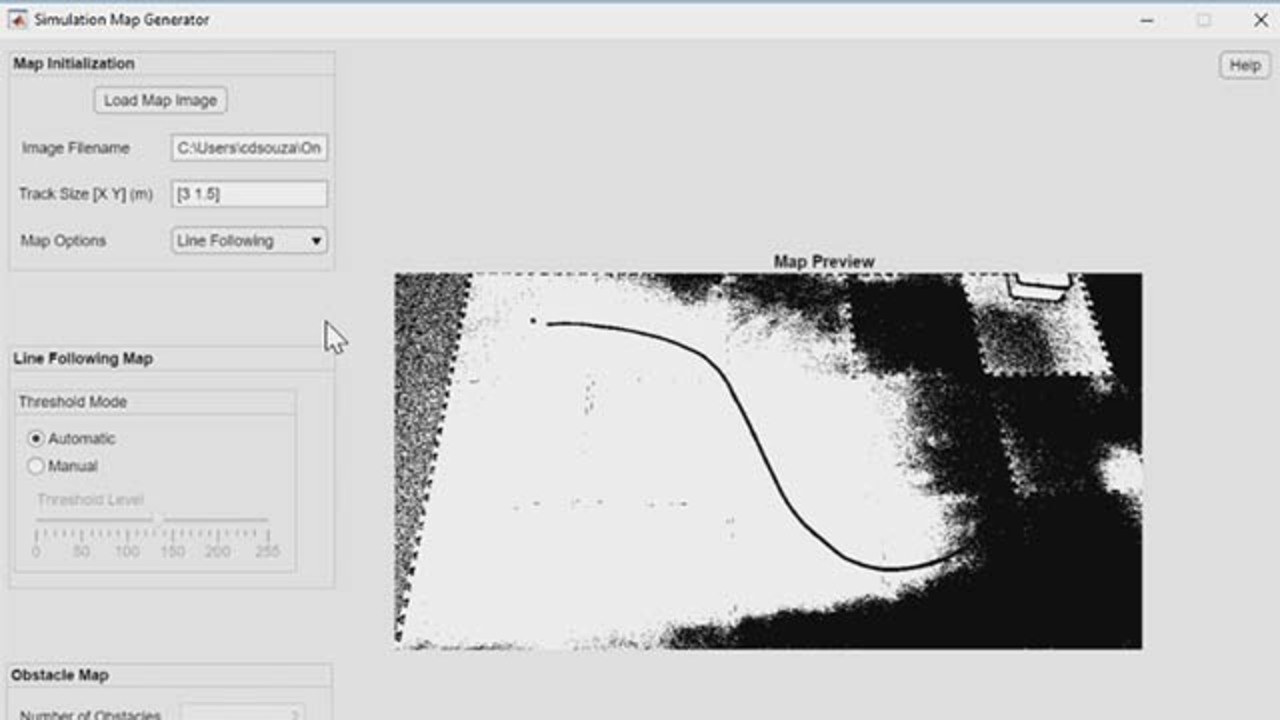
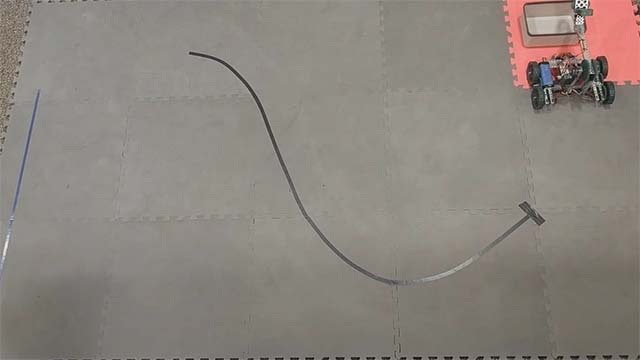
In this video, you will also be introduced to the Simulation Map Generator App that will allow you to create a line following map from an actual image of the line track. You will learn how to use the generated map for simulating and testing your algorithms within Simulink.
A VEX EDR robot is used to demonstrate the performance of the line following algorithms on the microcontroller and to observe the difference in the results between the On-Off and PID algorithms.
Additional Resources:
- Line Follower with Arm and Claw Position Control using Line Tracker, Potentiometer, and Encoder
- Line Follower Application for Arduino Robot
- Mobile Robotics Training Toolbox
- Understanding Control Systems
- Simulink Coder Support for VEX Microcontroller
- Path Following for a Differential Drive Robot
- Parameter Tuning and Signal Logging with Serial External Modee -
Recorded: 27 Jun 2017
Download Code and Files
Related Products
Learn More











Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: United States.
También puede seleccionar uno de estos países/idiomas:
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)