imwarp
Aplicar la transformación geométrica a una imagen
Sintaxis
Descripción
[ transforma una imagen con referencia espacial especificada por los datos de la imagen B,RB] = imwarp(A,RA,tform)A y su objeto de referencia espacial asociado RA. Las salidas son una imagen con referencia espacial especificada por los datos de la imagen B y su objeto de referencia espacial asociado RB.
[___] = imwarp(___, especifica el tipo de interpolación que usar.interp)
[___] = imwarp(___, especifica argumentos de nombre-valor para controlar los diversos aspectos de la transformación geométrica. Name=Value)
Sugerencia
Si la transformación de entrada tform no define una transformación hacia adelante, utilice el argumento nombre-valor OutputView para acelerar la transformación.
Ejemplos
Lea una imagen en escala de grises y muéstrela.
I = imread('cameraman.tif');
imshow(I)
Cree un elemento estructurante afín 2D.
A = [1 0.5 0; 0 1 0; 0 0 1]; tform = affinetform2d(A);
Aplique la transformación a la imagen.
J = imwarp(I,tform); imshow(J)

Cargue y muestre una imagen volumétrica de RM 3D.
load("mri");
mriVolume = squeeze(D);
volshow(mriVolume);![]()
Cree un objeto de transformación rígida 3D que rote la imagen alrededor del eje y.
theta = [0 22.5 0]; transl = [0 0 0]; tform = rigidtform3d(theta,transl);
Aplique la transformación a la imagen y muestre el resultado.
mriVolumeRotated = imwarp(mriVolume,tform); volshow(mriVolumeRotated);
![]()
Lea y muestre una imagen. Para ver las extensiones espaciales de la imagen, haga visibles los ejes.
A = imread("kobi.png"); A = imresize(A,0.25); iptsetpref("ImshowAxesVisible","on") imshow(A)

Cree un elemento estructurante afín 2D. Este ejemplo crea una transformación aleatoria que consta de una escala por un factor en el intervalo [1,2, 2,4], una rotación por un ángulo en el intervalo [-45, 45] grados, y una traslación horizontal por una distancia en el intervalo de [100, 200] píxeles.
tform = randomAffine2d("Scale",[1.2,2.4],"XTranslation",[100 200],"Rotation",[-45,45]);
Cree tres vistas de salida diferentes para la imagen y la transformación.
centerOutput = affineOutputView(size(A),tform,"BoundsStyle","CenterOutput"); followOutput = affineOutputView(size(A),tform,"BoundsStyle","FollowOutput"); sameAsInput = affineOutputView(size(A),tform,"BoundsStyle","SameAsInput");
Aplique la transformación a la imagen de entrada utilizando cada uno de los diferentes estilos de vista de salida.
BCenterOutput = imwarp(A,tform,"OutputView",centerOutput); BFollowOutput = imwarp(A,tform,"OutputView",followOutput); BSameAsInput = imwarp(A,tform,"OutputView",sameAsInput);
Muestre las imágenes resultantes.
imshow(BCenterOutput)
title("CenterOutput Bounds Style");
imshow(BFollowOutput)
title("FollowOutput Bounds Style");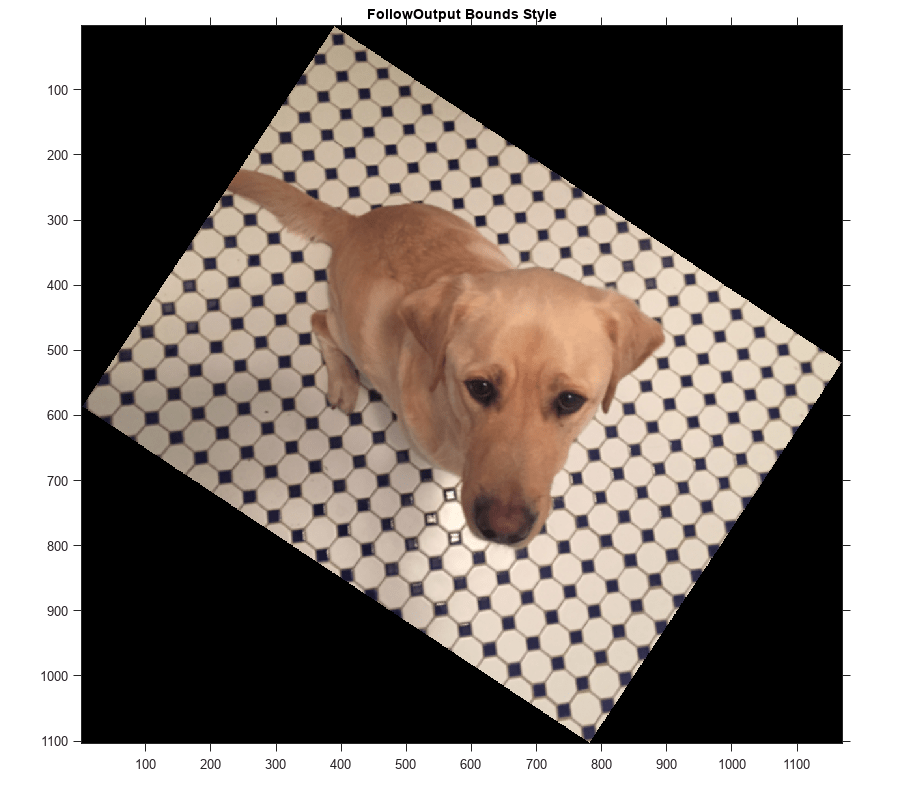
imshow(BSameAsInput)
title("SameAsInput Bounds Style");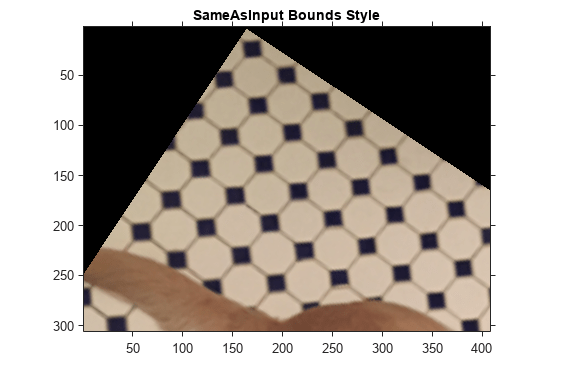
iptsetpref("ImshowAxesVisible","off")
Argumentos de entrada
Argumentos de par nombre-valor
Argumentos de salida
Sugerencias
Si desea aplicar una transformación geométrica idéntica a un lote de imágenes del mismo tamaño, puede utilizar el objeto
Warpery la funciónwarp. En comparación conimwarp, el objetoWarperacelera significativamente la transformación para lotes de imágenes de tamaño pequeño a mediano, con rendimientos decrecientes para imágenes más grandes.
Algoritmos
imwarp determina el valor de los píxeles de la imagen de salida mediante la asignación de ubicaciones en la imagen de salida a las ubicaciones correspondientes en la imagen de entrada (una asignación inversa). Cuando el centro de un píxel de la imagen de salida no coincide con el centro de un píxel de la imagen de entrada, imwarp interpola dentro de la imagen de entrada para calcular el valor del píxel de salida.
La figura ilustra una transformación de traslación de una imagen de damero, en la que cada cuadrado tiene 10 por 10 píxeles. Por convención, los ejes en el espacio de entrada se etiquetan como u y v y los ejes en el espacio de salida como x e y. Mediante la transformación inversa, el píxel con coordenadas (x,y) (25,35) en el espacio de coordenadas de salida se asigna a las coordenadas(u,v) (5,5) en el espacio de coordenadas de entrada.
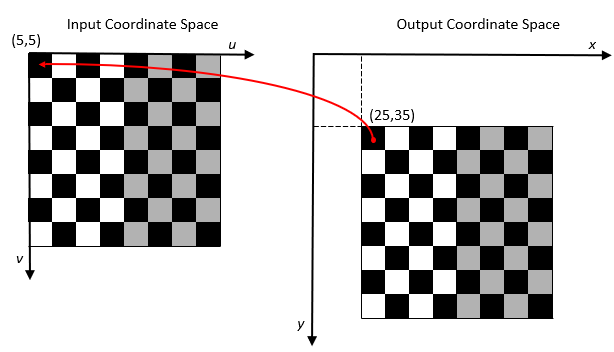
imwarp realiza la asignación utilizando coordenadas mundiales. Para obtener más información, consulte Sistemas de coordenadas de imagen.