plannerBenchmark
Planificadores de ruta de referencia utilizando métricas generadas
Desde R2022a
Descripción
El objeto plannerBenchmark evalúa los planificadores de rutas 2D al ejecutarlos en un entorno específico con posiciones de inicio y destino específicas.
El objeto plannerBenchmark calcula las siguientes métricas:
clearance— Distancia mínima a los obstáculos del entornoexecutionTime— Tiempo que tarda la función del plan en ejecutarseinitializationTime— Tiempo que tarda la función de inicialización en ejecutarseisPathValid— Si es verdadero, representa que la ruta existe y no tiene colisiones.pathLength— Longitud de la ruta generadasmoothness— Suavidad del trazado para todas las poses
Las métricas como executionTime y initializationTime se calculan durante la ejecución de los planificadores. Las métricas como clearance, isPathValid, pathLength y smoothness se calculan a partir de las salidas de ruta resultantes después de ejecutar los planificadores. Las métricas calculadas se resumen estadísticamente en forma de tabla y se pueden visualizar como gráficos.
Creación
Descripción
plannerBM = plannerBenchmark(environment,start,goal)plannerBenchmark con las poses environment, start y goal especificadas. Las entradas environment, start y goal establecen las propiedades Environment, Start y Goal, respectivamente.
Propiedades
Funciones del objeto
addPlanner | Agregar un planificador de rutas para realizar evaluaciones comparativas |
copy | Crear una copia profunda del objeto PlannerBenchmark |
metric | Métricas del planificador de ruta de retorno |
report | Crear informe de referencia |
runPlanner | Ejecutar planificadores de rutas |
show | Visualice las métricas del planificador de rutas |
Ejemplos
Cree un mapa de ocupación a partir de un mapa de ejemplo.
load("exampleMaps.mat","simpleMap"); map = occupancyMap(simpleMap);
Cree un validador de estado con stateSpaceSE2 usando el mapa.
sv = validatorOccupancyMap(stateSpaceSE2,Map=map);
Especifique los estados de inicio y objetivo.
start = [5 8 pi/2]; goal = [7 18 pi/2];
Cree un objeto plannerBenchmark.
pbo = plannerBenchmark(sv,start,goal);
Defina los identificadores de funciones para las funciones de inicialización de los planificadores.
plannerHAFcn = @(sv)plannerHybridAStar(sv); plannerRRTSFcn = @(sv)plannerRRTStar(sv.StateSpace,sv);
Defina el identificador de función para la función del plan, que es común para ambos planificadores.
plnFcn = @(initOut,s,g)plan(initOut,s,g);
Agregue los planificadores de ruta para realizar evaluaciones comparativas.
addPlanner(pbo,plnFcn,plannerHAFcn);
addPlanner(pbo,plnFcn,plannerRRTSFcn,PlannerName="ppRRTStar");Establezca rng para obtener resultados repetitivos.
rng('default')Ejecute los planificadores de rutas la cantidad de veces especificada en runCount para recopilar métricas.
runCount = 5; runPlanner(pbo,runCount)
Initializing plannerHAFcn_plnFcn ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using plannerHAFcn_plnFcn. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5. Initializing ppRRTStar ... Done. Planning a path from the start pose (5 8 1.5708) to the goal pose (7 18 1.5708) using ppRRTStar. Executing run 1. Executing run 2. Executing run 3. Executing run 4. Executing run 5.
Acceda a la métrica de longitud de ruta para todas las ejecuciones en el entorno.
[pLenSummary,pLenData] = metric(pbo,"pathLength")pLenSummary=2×4 table
Mean Median StdDev sampleSize
______ ______ _______ __________
plannerHAFcn_plnFcn 10.349 10.349 0 5
ppRRTStar 12.84 12.9 0.67112 5
pLenData=2×5 table
Run1 Run2 Run3 Run4 Run5
______ ______ ______ ______ ______
plannerHAFcn_plnFcn 10.349 10.349 10.349 10.349 10.349
ppRRTStar 13.8 12.9 12.2 12 13.3
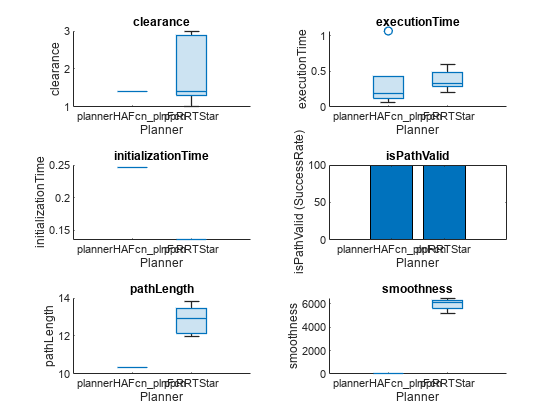
Visualiza todas las métricas.
show(pbo)
Inspeccione de cerca la métrica de espacio libre.
figure
show(pbo,"clearance")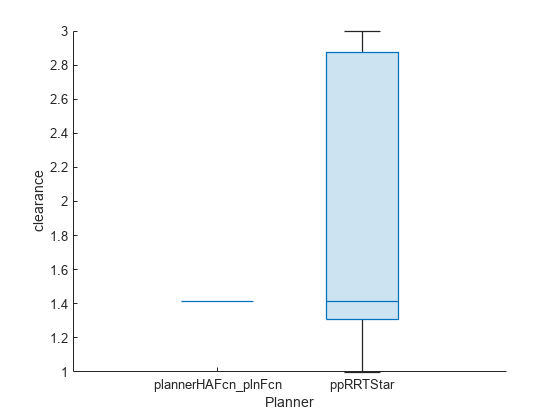
Historial de versiones
Introducido en R2022a