Autonomía todoterreno para maquinaria pesada
Desarrolle sistemas autónomos para vehículos todoterreno y maquinaria pesada destinada a aplicaciones de construcción, agricultura y minería con el paquete de soporte Robotics System Toolbox™ Offroad Autonomy Library. Este paquete de soporte proporciona herramientas especializadas para diseñar, simular y probar algoritmos de autonomía. A través de la integración con Unreal Engine®, este paquete de soporte facilita las simulaciones de escenarios fotorrealistas para probar y mejorar el rendimiento de vehículos todoterreno, como volquetes y retroexcavadoras, en diversas condiciones.
Para descargar el paquete de soporte Robotics System Toolbox Offroad Autonomy Library, consulte Instalar el paquete de soporte Robotics System Toolbox Offroad Autonomy Library.
Para obtener más información sobre cómo usar Unreal Engine con Robotics System Toolbox, consulte Simulación de escenarios de Unreal Engine.
Funciones
offroadControllerMPPI | Local path planner for offroad vehicles and heavy machinery using MPPI algorithm (Desde R2024b) |
articulatedSteeringKinematics | Articulated steering vehicle model (Desde R2025a) |
traversabilityMap | Create traversability map using elevation data and semantic cost of terrain (Desde R2025a) |
Bloques
Escenas
| Offroad Pit Mining Scene | Offroad pit mining scene in Unreal Engine environment |
| Construction Site Scene | Construction site scene in Unreal Engine environment |
| Rolling Vineyard | Vineyard on rolling hills in Unreal Engine environment |
Temas
Aplicaciones de referencia
- Navegación todoterreno para camiones volquete autónomos en una mina a cielo abierto
La serie muestra cómo crear un conjunto de planificadores que permitan a los camiones volquete autónomos navegar por terrenos irregulares y evitar los obstáculos. (Desde R2024a)
- PASO 1: Create Route Planner for Offroad Navigation Using Digital Elevation Data
- PASO 2: Create Onramp and Terrain-Aware Global Planners for Offroad Navigation
- PASO 3: Navigate Global Path Through Offroad Terrain Using Local Planner
- PASO 4: Create Path Following Model Predictive Controller
- PASO 5: Model and Control Autonomous Vehicle in Offroad Scenario
Tema de seguimiento de trayectorias
- Introduction to Model Predictive Path Integral (MPPI) Controller
Path planning using Model Predictive Path Integral (MPPI) with adaptable vehicle models. (Desde R2026a)
Configuración del paquete de soporte
- Instalar el paquete de soporte Robotics System Toolbox Offroad Autonomy Library
Utilice Add-On Explorer para diseñar, simular y validar algoritmos para maquinaria pesada todoterreno.
Ejemplos destacados

Simulate Earth Moving with Autonomous Excavator in Construction Site
Simulate ground excavation to create a depression and move spoil to dump truck and further relocate it to another site.

Navegación todoterreno para camiones volquete autónomos en una mina a cielo abierto
La serie muestra cómo crear un conjunto de planificadores que permitan a los camiones volquete autónomos navegar por terrenos irregulares y evitar los obstáculos.

Simulate Construction Vehicles in Unreal Engine for Material Handling
Set up a simulation in which backhoe loads construction bricks into a dump truck in an Unreal Engine construction site scene.
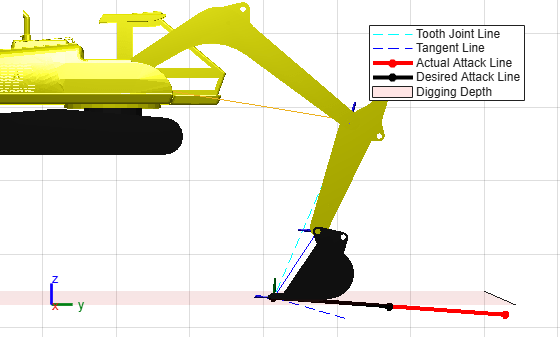
Constrain Links of Excavator for Earth Moving
Solve joint angles for excavator digging, grading, and unloading trajectories with GIK.

Plan Collision-Free Path for Excavator Arm in MATLAB With Lidar Data
Plan path for excavator arm in environment generated from lidar data.

Survey Pit Mining Site with RTK GPS and Point Clouds
Generate a digital elevation model (DEM) of a site using real-time kinematic (RTK) GPS and aerial lidar data.

Extract Scene From Lidar Data
Create map of environment using point cloud data from lidar sensors mounted on an excavator.
Generate Traversability Map for Offroad Terrain Using Semantic Segmentation
Create real-time traversability map for offroad terrain by fusing semantic segmentation from camera images with lidar point clouds.