ROSとつながるMATLAB (画像処理編)
出典シリーズ: 出典シリーズ: 画像処理・コンピュータビジョン
Robotics System Toolboxの登場により、MATLABが直接ROSネットワークに接続できるようになりました。
これまで、MATLAB上で開発したRobotics関連のアルゴリズムを検証するためには、一旦C++コード等でアルゴリズムを書き直し、ROSノードとしてROSネットワークに接続して検証を進める必要がありましたが、MATLABがROSネットワークに直接接続できることで、このプロセスを省略し、すぐにアルゴリズムの検証に着手できます。
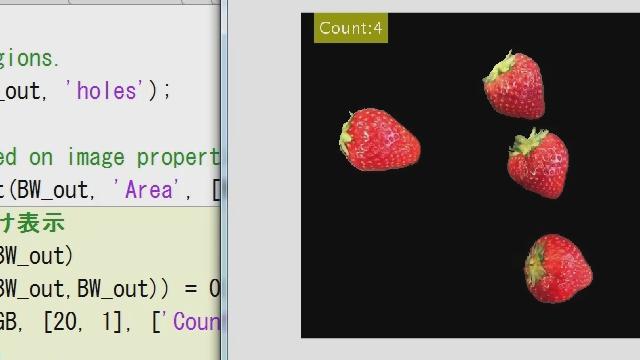
例えば画像処理では、MATLAB上の豊富な画像処理ライブラリを組み合わせる事により、C/C++コードで記述すると膨大なコード量になってしまう処理内容を、デバッグの容易なMATLABコードで簡潔に実現する事が出来ます。
このアルゴリズム開発環境としてのMATLABがROSネットワークに直接接続できる事で、最適なアルゴリズムの探求がより一層効率的に行えるようになり、Robotics関連アルゴリズムの研究・開発を進めている方々にとって非常に大きなメリットがあります。
本Webセミナーでは、実際にMATLAB上での画像処理と、画像処理結果を利用したロボットの制御の一連の流れを、実際にデモを交えてご紹介いたします。
録画: 2015 年 3 月 18 日










Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: United States.
También puede seleccionar uno de estos países/idiomas:
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)