estimateStates
Sintaxis
Descripción
estimates = estimateStates(filter,sensorData,measurementNoise)sensorData y fusiona los datos de cada columna de la tabla uno por uno.
[ además devuelve las estimaciones de estado suavizadas mediante el suavizador de Kalman no lineal Rauch-Tung-Striebel (RTS). Para obtener detalles del algoritmo, consulte Algoritmos y [1].estimates,smoothEstimates] = estimateStates(___)
Sugerencia
El suavizado suele requerir considerablemente más memoria y tiempo de cálculo. Utilice esta sintaxis sólo cuando necesite los estados estimados suavizados.
Ejemplos
Cargue datos de medición desde un acelerómetro y un giroscopio.
load("accelGyroINSEKFData.mat");Crea un objeto de filtro insEKF. Especifique la parte de orientación del estado en el filtro utilizando la orientación inicial de los datos de medición. Especifique los elementos diagonales de la matriz de covarianza de error de estimación de estado correspondiente al estado de orientación como 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Especifique el ruido de medición y el ruido del proceso aditivo. Puede obtener estos valores utilizando la función de objeto tune del objeto de filtro.
measureNoise = struct("AccelerometerNoise", 0.1739, ... "GyroscopeNoise", 1.1129); processNoise = diag([ ... 2.8586 1.3718 0.8956 3.2148 4.3574 2.5411 3.2148 0.5465 0.2811 ... 1.7149 0.1739 0.7752 0.1739]); filt.AdditiveProcessNoise = processNoise;
Estime por lotes los estados utilizando la función de objeto estimateStates. Además, obtenga las estimaciones después del suavizado.
[estimates,smoothEstimates] = estimateStates(filt,sensorData,measureNoise);
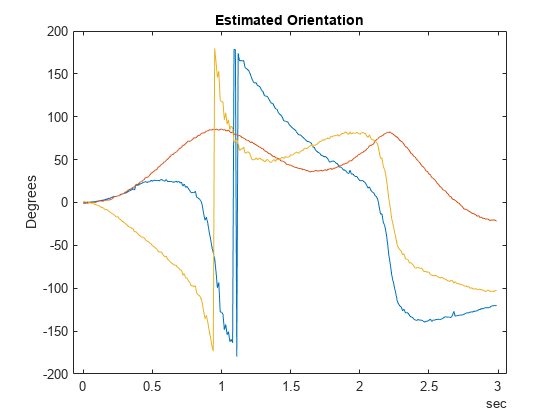
Visualice la orientación estimada en ángulos de Euler.
figure t = estimates.Properties.RowTimes; plot(t,eulerd(estimates.Orientation,"ZYX","frame")); title("Estimated Orientation"); ylabel("Degrees")
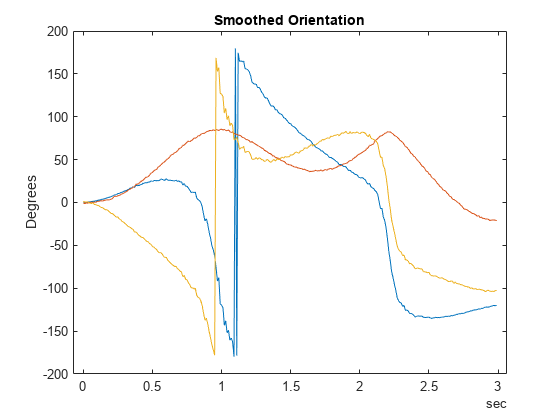
Visualice la orientación estimada después del suavizado en ángulos de Euler.
figure plot(t,eulerd(smoothEstimates.Orientation,"ZYX","frame")); title("Smoothed Orientation"); ylabel("Degrees")
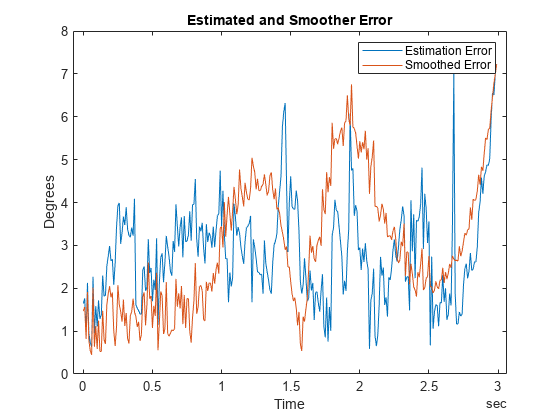
Visualice el error de estimación, en distancia de cuaternión, utilizando la función de objeto dist del objeto quaternion.
trueOrient = groundTruth.Orientation; plot(t,rad2deg(dist(estimates.Orientation, trueOrient)), ... t,rad2deg(dist(smoothEstimates.Orientation, trueOrient))); title("Estimated and Smoother Error"); legend("Estimation Error","Smoothed Error") xlabel("Time"); ylabel("Degrees")
Argumentos de entrada
Argumentos de salida
Algoritmos
Referencias
[1] Crassidis, John L., and John L. Junkins. "Optimal Estimation of Dynamic Systems". 2nd ed, CRC Press, pp. 349- 352, 2012.
Capacidades ampliadas
Historial de versiones
Introducido en R2022aConsulte también
predict | fuse | residual | correct | stateparts | statecovparts | stateinfo | tune | createTunerCostTemplate | tunerCostFcnParam