insEKF
Descripción
El objeto insEKF crea un filtro de Kalman extendido continuo-discreto (EKF), en el que la predicción del estado utiliza un modelo de tiempo continuo y la corrección del estado utiliza un modelo de tiempo discreto. El filtro utiliza datos de sensores inerciales para estimar los estados de la plataforma, como la posición, la velocidad y la orientación. La toolbox proporciona algunos modelos de sensores, como insAccelerometer, insGyroscope, insGPS y insMagnetometer, que puede utilizar para habilitar las mediciones correspondientes en el EKF. También puede personalizar sus propios modelos de sensores heredando de la clase de interfaz positioning.INSSensorModel (Sensor Fusion and Tracking Toolbox). La toolbox también proporciona modelos de movimiento, como insMotionOrientation y insMotionPose, que puede utilizar para habilitar la propagación del estado correspondiente en el EKF. También puedes personalizar tus propios modelos de movimiento heredando de la clase de interfaz positioning.INSMotionModel (Sensor Fusion and Tracking Toolbox).
Creación
Sintaxis
Descripción
filter = insEKFinsEKF con valores de propiedad predeterminados. Con la configuración predeterminada, el filtro puede estimar la orientación fusionando datos del acelerómetro y el giroscopio.
filter = insEKF(sensor1,sensor2,...,sensorN)Sensors.
filter = insEKF(___,motionModel)MotionModel.
filter = insEKF(___,options)insOptions options.
Propiedades
Funciones del objeto
predict | Predecir estimaciones de estado hacia adelante en el tiempo para insEKF |
fuse | Datos del sensor de fusibles para la estimación del estado en insEKF |
residual | Covarianza residual y residual de la medición del estado para insEKF |
correct | Estimaciones de estado correctas en insEKF utilizando mediciones de estado directas |
stateparts | Obtener y establecer parte del vector de estado en insEKF |
statecovparts | Obtener y establecer parte de la matriz de covarianza de estados en insEKF |
stateinfo | Información del vector de estado para insEKF |
estimateStates | Fusión por lotes y suavizado de datos de sensores |
tune | Ajuste los parámetros insEKF para reducir el error de estimación |
createTunerCostTemplate | Crear plantilla de función de coste del ajustador |
tunerCostFcnParam | Primer ejemplo de parámetro para ajustar la función de coste |
copy | Crear copia de insEKF |
reset | Restablecer estados para insEKF |
Ejemplos
Crea un objeto insEKF predeterminado. De forma predeterminada, el filtro fusiona los datos de medición de un acelerómetro y un giroscopio asumiendo un movimiento de solo orientación.
filter1 = insEKF
filter1 =
insEKF with properties:
State: [13×1 double]
StateCovariance: [13×13 double]
AdditiveProcessNoise: [13×13 double]
MotionModel: [1×1 insMotionOrientation]
Sensors: {[1×1 insAccelerometer] [1×1 insGyroscope]}
SensorNames: {'Accelerometer' 'Gyroscope'}
ReferenceFrame: 'NED'
Crea un segundo objeto insEKF que fusione datos de un acelerómetro, un giroscopio y un magnetómetro, y que además modele tanto el movimiento de rotación como el de traslación.
filter2 = insEKF(insAccelerometer,insGyroscope,insMagnetometer,insMotionPose)
filter2 =
insEKF with properties:
State: [28×1 double]
StateCovariance: [28×28 double]
AdditiveProcessNoise: [28×28 double]
MotionModel: [1×1 insMotionPose]
Sensors: {[1×1 insAccelerometer] [1×1 insGyroscope] [1×1 insMagnetometer]}
SensorNames: {'Accelerometer' 'Gyroscope' 'Magnetometer'}
ReferenceFrame: 'NED'
Crea un tercer objeto insEKF que fusiona datos de un giroscopio y un GPS. Especifique el marco de referencia del filtro como el marco este-norte arriba (ENU). Tenga en cuenta que el modelo de movimiento que utiliza el filtro es el objeto insMotionPose porque un GPS mide las posiciones de la plataforma.
option = insOptions(ReferenceFrame="ENU");
filter3 = insEKF(insGyroscope,insGPS,option)filter3 =
insEKF with properties:
State: [19×1 double]
StateCovariance: [19×19 double]
AdditiveProcessNoise: [19×19 double]
MotionModel: [1×1 insMotionPose]
Sensors: {[1×1 insGyroscope] [1×1 insGPS]}
SensorNames: {'Gyroscope' 'GPS'}
ReferenceFrame: 'ENU'
Cargue datos de medición desde un acelerómetro y un giroscopio.
load("accelGyroINSEKFData.mat");Crea un objeto de filtro insEKF. Especifique la parte de orientación del estado en el filtro utilizando la orientación inicial de los datos de medición. Especifique los elementos diagonales de la matriz de covarianza de error de estimación de estado correspondiente al estado de orientación como 0.01.
accel = insAccelerometer; gyro = insGyroscope; filt = insEKF(accel,gyro); stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Especifique el ruido de medición y el ruido del proceso aditivo. Puede obtener estos valores utilizando la función de objeto tune del objeto de filtro.
accNoise = 0.1739; gyroNoise = 1.1129; processNoise = diag([ ... 2.8586 1.3718 0.8956 3.2148 4.3574 2.5411 3.2148 0.5465 0.2811 ... 1.7149 0.1739 0.7752 0.1739]); filt.AdditiveProcessNoise = processNoise;
Fusionar secuencialmente los datos de medición utilizando las funciones de objeto predict y fuse del objeto de filtro.
N = size(sensorData,1); estOrient = quaternion.zeros(N,1); dt = seconds(diff(sensorData.Properties.RowTimes)); for ii = 1:N if ii ~= 1 % Step forward in time. predict(filt,dt(ii-1)); end % Fuse accelerometer data. fuse(filt,accel,sensorData.Accelerometer(ii,:),accNoise); % Fuse gyroscope data. fuse(filt,gyro,sensorData.Gyroscope(ii,:),gyroNoise); % Extract the orientation state estimate using the stateparts object % function. estOrient(ii) = quaternion(stateparts(filt,"Orientation")); end
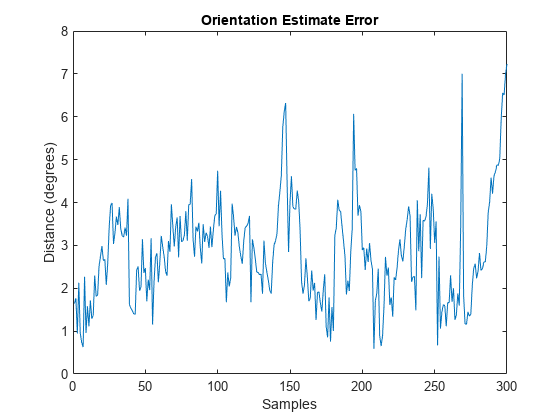
Visualice el error de estimación, en distancia de cuaternión, utilizando la función de objeto dist del objeto quaternion.
figure plot(rad2deg(dist(estOrient,groundTruth.Orientation))) xlabel("Samples") ylabel("Distance (degrees)") title("Orientation Estimate Error")
Cargue datos de medición desde un acelerómetro y un giroscopio.
load("accelGyroINSEKFData.mat");Crea un objeto de filtro insEKF. Especifique la parte de orientación del estado en el filtro utilizando la orientación inicial de los datos de medición. Especifique los elementos diagonales de la matriz de covarianza de error de estimación de estado correspondiente al estado de orientación como 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Especifique el ruido de medición y el ruido del proceso aditivo. Puede obtener estos valores utilizando la función de objeto tune del objeto de filtro.
measureNoise = struct("AccelerometerNoise", 0.1739, ... "GyroscopeNoise", 1.1129); processNoise = diag([ ... 2.8586 1.3718 0.8956 3.2148 4.3574 2.5411 3.2148 0.5465 0.2811 ... 1.7149 0.1739 0.7752 0.1739]); filt.AdditiveProcessNoise = processNoise;
Estime por lotes los estados utilizando la función de objeto estimateStates. Además, obtenga las estimaciones después del suavizado.
[estimates,smoothEstimates] = estimateStates(filt,sensorData,measureNoise);
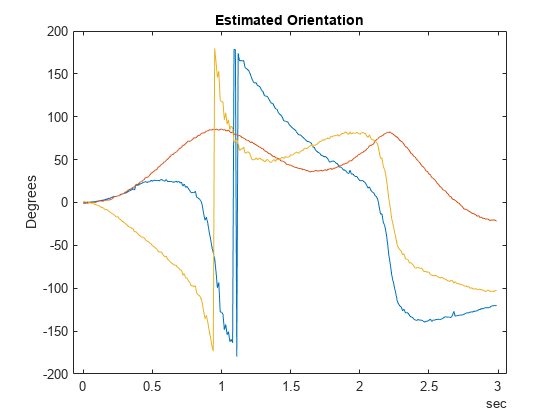
Visualice la orientación estimada en ángulos de Euler.
figure t = estimates.Properties.RowTimes; plot(t,eulerd(estimates.Orientation,"ZYX","frame")); title("Estimated Orientation"); ylabel("Degrees")
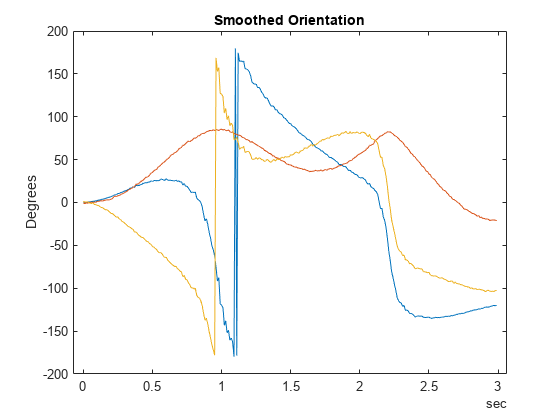
Visualice la orientación estimada después del suavizado en ángulos de Euler.
figure plot(t,eulerd(smoothEstimates.Orientation,"ZYX","frame")); title("Smoothed Orientation"); ylabel("Degrees")
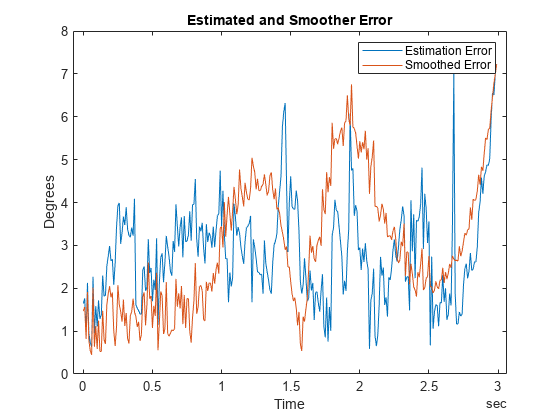
Visualice el error de estimación, en distancia de cuaternión, utilizando la función de objeto dist del objeto quaternion.
trueOrient = groundTruth.Orientation; plot(t,rad2deg(dist(estimates.Orientation, trueOrient)), ... t,rad2deg(dist(smoothEstimates.Orientation, trueOrient))); title("Estimated and Smoother Error"); legend("Estimation Error","Smoothed Error") xlabel("Time"); ylabel("Degrees")
Capacidades ampliadas
Historial de versiones
Introducido en R2022a
Consulte también
insOptions | insAccelerometer | insGPS | insGyroscope | insMagnetometer | insMotionOrientation | insMotionPose | positioning.INSMotionModel | positioning.INSSensorModel | tunerconfig | tunernoise | tunerPlotPose