addPointLandmark
Agregar un nodo de punto de referencia al gráfico de pose
Sintaxis
Descripción
addPointLandmark( agrega un nodo de punto de referencia, basado en la posición de entrada poseGraph,measurement)measurement que se conecta al último nodo de pose en el gráfico de pose. Para agregar nodos de medición de pose, consulte la función addRelativePose.
addPointLandmark( también especifica la matriz de información como parte de la restricción de borde, que representa la incertidumbre de la medición del punto de referencia.poseGraph,measurement,infoMat)
addPointLandmark( agrega un nuevo nodo de punto de referencia y lo conecta al nodo de pose especificado por poseGraph,measurement,infoMat,poseNodeID)poseNodeID.
addPointLandmark( crea un borde al especificar una medición de punto entre nodos existentes, especificados por poseGraph,measurement,infoMat,poseNodeID,pointNodeID)poseNodeID y pointNodeID. Si el par de nodos ya existe, la función agrega la nueva medición.
Ejemplos
Crea un objeto gráfico de pose 2D.
pg = poseGraph;
Agregue poses relativas al gráfico de pose.
addRelativePose(pg,[1 1 pi/2]); addRelativePose(pg,[2 2 pi/3]);
Agregue un nodo de punto de referencia al último nodo de pose en el gráfico de pose.
addPointLandmark(pg,[1 1]); show(pg);
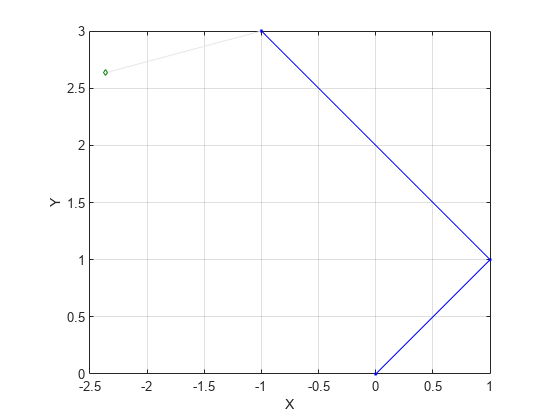
Enumere todas las poses en el gráfico de poses.
nodeEstimates(pg)
ans = 4×3
0 0 0
1.0000 1.0000 1.5708
-1.0000 3.0000 2.6180
-2.3660 2.6340 NaN
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2021a