Planificación de movimiento y trayectorias
Planifique trayectorias utilizando planificadores personalizables como el árbol aleatorio de exploración rápida (RRT) y los algoritmos de optimización hamiltoniana covariante para planificación de movimiento (CHOMP) para manipuladores y el roadmap probabilístico (PRM) para robots móviles. Diseñe planificadores de movimiento personalizables aprovechando Navigation Toolbox™.
Genere trayectorias para un movimiento suave alrededor de una trayectoria global evadiendo obstáculos.
Categorías
- Planificación de manipuladores
Planificación de trayectorias y movimiento de manipuladores mediante RRT y CHOMP
- Planificación de robots móviles
Mapeo, localización, planificación de trayectorias, seguimiento de trayectorias
- Generación de trayectorias
Generar trayectorias polinomiales, de B-spline y trapezoidales
Ejemplos destacados

Design a Trajectory Planner for a Robotic Manipulator
Design a planner in Simulink that generates collision-free trajectories for sorting items in a bin picking system.

Pick-And-Place Workflow Using CHOMP for Manipulators
Use CHOMP to plan smooth and collision-free trajectories for a pick-and-place workflow.
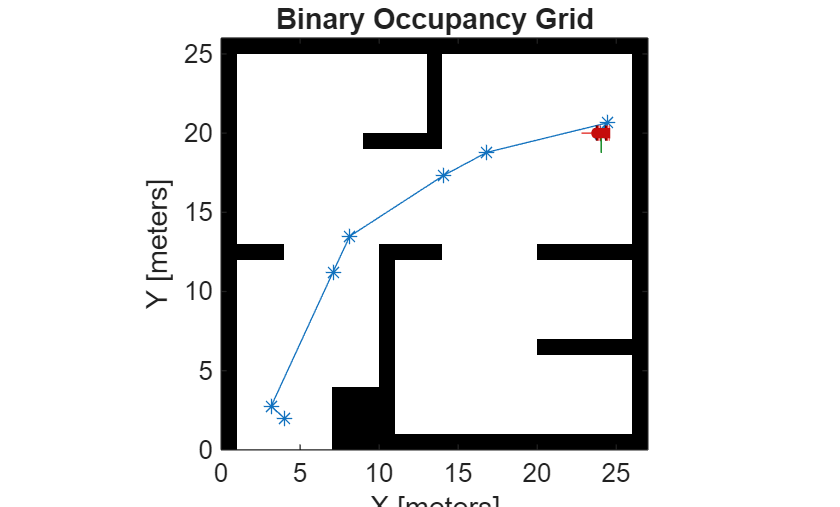
Seguimiento de trayectorias para un robot de tracción diferencial
Dirija un robot simulado por una trayectoria predeterminada usando el controlador de seguimiento de trayectorias Pure Pursuit.

Design Trajectory with Velocity Limits Using Trapezoidal Velocity Profile
Use the trapezoidal velocity profile to design a trajectory with input bounds in place of parameters.

Plan Path in Warehouse Scenario with Unseen Obstacle Avoidance
Plan path in a warehouse scenario by avoiding unseen obstacles using TEB algorithm.
Simulate Path Following on Speedgoat Real-Time Target Machine
Perform real-time simulation of path following on Speedgoat real-time target machine.
Recursos de formación

Manipuladores robóticos
Aprenda los conceptos del movimiento de los brazos robóticos por medio de transformaciones del sistema de coordenadas, parámetros DH y cinemática directa/inversa.