mobileRobotPropagator
Descripción
El objeto mobileRobotPropagator es un propagador de estados que propaga y valida el estado de un robot móvil según comandos de control, duraciones y estados objetivo. El objeto admite diferentes modelos cinemáticos, tipos de integradores y políticas de control.
Creación
Descripción
mobileProp = mobileRobotPropagator
mobileProp = mobileRobotPropagator(Name,Value)mobileRobotPropagator("ControlStepSize"=0.01) crea un propagador de robot móvil con un tamaño de paso de control de 0,01.
Propiedades
Funciones del objeto
distance | Estimar el coste de propagación al estado objetivo |
propagate | Propagar el sistema sin validación. |
propagateWhileValid | Propagar el sistema y devolver un movimiento válido. |
sampleControl | Generar comando de control y duración. |
setup | Configurar el propagador de estado del robot móvil |
Ejemplos
Planifique rutas de control para un modelo cinemático de bicicleta con el objeto mobileRobotPropagator. Especifique un mapa para el entorno, establezca límites estatales y defina una ubicación de inicio y objetivo. Planifique una ruta utilizando el algoritmo RRT basado en control, que utiliza un propagador de estado para planificar el movimiento y los comandos de control necesarios.
Establecer parámetros de estado y propagador de estado
Cargue una matriz de mapa ternario y cree un objeto occupancyMap. Cree el propagador de estado usando el mapa. De forma predeterminada, el propagador de estado utiliza un modelo cinemático de bicicleta.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Establezca los límites estatales en el espacio de estados según los límites del mundo del mapa.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Planificar ruta
Cree el planificador de ruta a partir del propagador de estado.
planner = plannerControlRRT(propagator);
Especifique los estados de inicio y objetivo.
start = [10 15 0]; goal = [40 30 0];
Planificar una ruta entre los estados. Para obtener resultados repetibles, reinicie el generador de números aleatorios antes de planificar. La función plan genera un objeto navPathControl, que contiene los estados, los comandos de control y las duraciones.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1×1 mobileRobotPropagator]
States: [192×3 double]
Controls: [191×2 double]
Durations: [191×1 double]
TargetStates: [191×3 double]
NumStates: 192
NumSegments: 191
Visualizar resultados
Visualice el mapa y trace los estados de la ruta.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](plankinodynamicpathwithcontrolsformobilerobotexample_01_es.png)
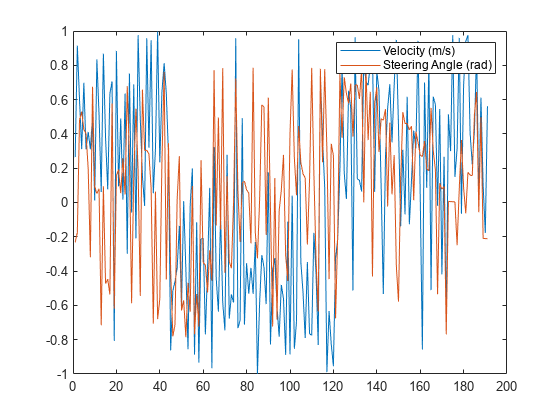
Muestra las entradas de control [v psi] de velocidad de avance y ángulo de dirección.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
Limitaciones
No se admite la implementación con MATLAB® Compiler™ cuando
KinematicModelestá configurado en'ackermann'.
Historial de versiones
Introducido en R2021b