rgbdvslam
Localización y mapeo visual simultáneo basado en características (vSLAM) y fusión de sensores visuales-inerciales con cámara RGB-D
Desde R2025a
Descripción
Utilice el objeto rgbdvslam para realizar localización y mapeo visual simultáneo (vSLAM) con datos de cámara RGB-D. RGB-D vSLAM combina información de profundidad de sensores, como cámaras RGB-D o sensores de profundidad, con imágenes RGB para estimar simultáneamente la posición de la cámara y crear un mapa del entorno. Para obtener más información sobre SLAM visual, consulte Implement Visual SLAM in MATLAB (Computer Vision Toolbox).
El objeto rgbdvslam extrae características Oriented FAST y Rotated BRIEF (ORB) de imágenes leídas incrementalmente y luego rastrea esas características para estimar poses de cámara, identificar fotogramas clave y reconstruir un entorno 3D. El algoritmo vSLAM también busca cierres de bucle utilizando el algoritmo de bolsa de características y luego optimiza las poses de la cámara utilizando la optimización del gráfico de poses. Puede mejorar la precisión y la robustez del SLAM integrando este objeto con datos IMU para realizar una fusión de sensores visuales-inerciales.
Creación
Sintaxis
Descripción
vslam = rgbdvslam(intrinsics)vslam, utilizando los parámetros intrínsecos de la cámara especificados.
El objeto rgbdvslam asume que las imágenes de color y profundidad han sido preregistradas con correspondencia uno a uno.
El objeto representa puntos de mapas 3D y poses de cámara en coordenadas mundiales, y asume que la pose de la cámara del primer fotograma clave es una transformación de identidad rigidtform3d (Image Processing Toolbox).
Nota
El objeto rgbdvslam se ejecuta en varios subprocesos internamente, lo que puede retrasar el procesamiento de un cuadro de imagen agregado mediante la función addFrame. Además, el objeto que se ejecuta en varios subprocesos significa que el cuadro actual que el objeto está procesando puede ser diferente del cuadro agregado recientemente.
vslam = rgbdvslam(intrinsics,depthScaleFactor)1.
vslam = rgbdvslam(___,imuParameters)imuParameters especificado.
vslam = rgbdvslam(intrinsics,PropertyName=Value)MaxNumPoints=850 establece el número máximo de puntos de características ORB para extraer de cada imagen en 850.
Argumentos de entrada
Propiedades
Funciones del objeto
addFrame | Agregue un par de imágenes de color y profundidad al objeto SLAM visual RGB-D |
hasNewKeyFrame | Compruebe si se agregó un nuevo fotograma clave en el objeto SLAM visual RGB-D |
checkStatus | Comprobar el estado del objeto SLAM RGB-D visual |
isDone | Estado de fin de procesamiento para el objeto SLAM visual RGB-D |
mapPoints | Construya un mapa 3D de puntos del mundo a partir de un objeto vSLAM RGB-D |
poses | Poses absolutas de cámara de fotogramas clave RGB-D vSLAM |
plot | Graficar puntos de mapa 3D y trayectoria estimada de la cámara en SLAM visual RGB-D |
reset | Restablecer el objeto SLAM visual RGB-D |
Ejemplos
Realice la localización y el mapeo visual simultáneos RGB-D (vSLAM) utilizando los datos del TUM RGB-D Benchmark. Puede descargar los datos a un directorio temporal utilizando un navegador web o ejecutando este código:
baseDownloadURL = "https://vision.in.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir,"tum_rgbd_dataset",filesep); options = weboptions(Timeout=Inf); tgzFileName = dataFolder+"fr3_office.tgz"; folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder) disp("Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.") websave(tgzFileName,baseDownloadURL,options); % Extract contents of the downloaded file disp("Extracting fr3_office.tgz (1.38 GB) ...") untar(tgzFileName,dataFolder); end
Crea dos objetos imageDatastore. Uno para almacenar las imágenes en color y el otro para almacenar las imágenes de profundidad.
colorImageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/rgb/"; depthImageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/depth/"; imdsColor = imageDatastore(colorImageFolder); imdsDepth = imageDatastore(depthImageFolder);
Seleccione el par sincronizado de imágenes de color y profundidad.
data = load("rgbDepthPairs.mat");
imdsColor=subset(imdsColor, data.indexPairs(:, 1));
imdsDepth=subset(imdsDepth, data.indexPairs(:, 2));Especifique los parámetros intrínsecos de su cámara y utilícelos para crear un objeto SLAM visual RGB-D.
intrinsics = cameraIntrinsics([535.4 539.2],[320.1 247.6],[480 640]); depthScaleFactor = 5000; vslam = rgbdvslam(intrinsics,depthScaleFactor);
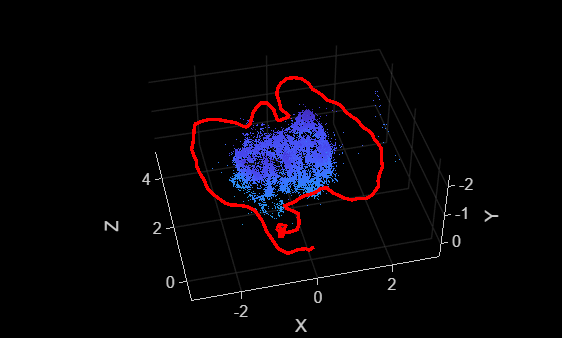
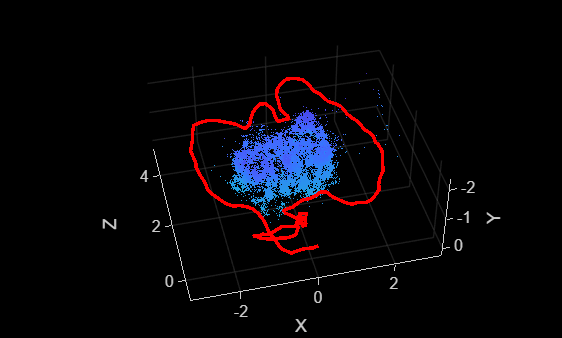
Procese cada par de imágenes de color y profundidad y visualice las poses de la cámara y los puntos del mapa 3D.
for i = 1:numel(imdsColor.Files) colorImage = readimage(imdsColor,i); depthImage = readimage(imdsDepth,i); addFrame(vslam,colorImage,depthImage); if hasNewKeyFrame(vslam) % Query 3-D map points and camera poses xyzPoints = mapPoints(vslam); [camPoses,viewIds] = poses(vslam); % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); % Stop adding frames when tracking is lost if status == uint8(0) break end end
Una vez procesados todos los fotogramas, reinicie el sistema.
while ~isDone(vslam) plot(vslam); end
reset(vslam);
Realice SLAM visual-inercial RGB-D utilizando los datos del OpenLORIS-Scene Dataset. Descargue los datos a un directorio temporal usando un navegador web o ejecutando este código:
dataFolder = fullfile(tempdir,"OpenLORIS-Scene",filesep); downloadURL = "https://ssd.mathworks.com/supportfiles/shared_nav_vision/data/OpenLORIS-Scene_corridor1-4.zip"; zipFileName = dataFolder+"corridor1-4.zip"; if ~isfolder(dataFolder) mkdir(dataFolder); disp("Downloading corridor1-4.zip (1.13 GB). This download can take a few minutes."); options = weboptions('Timeout', Inf); websave(zipFileName, downloadURL, options); unzip(zipFileName, dataFolder); end
Crea dos objetos imageDatastore. Uno para almacenar las imágenes en color y el otro para almacenar las imágenes de profundidad.
imageFolder = fullfile(dataFolder,"OpenLORIS-Scene_corridor1-4"); imdsColor = imageDatastore(fullfile(imageFolder,"color")); imdsDepth = imageDatastore(fullfile(imageFolder,"aligned_depth"));
Cargue los datos de mediciones de IMU y la transformación de cámara a IMU.
data = load("corridor4_IMU_data.mat");
gyro = data.gyroDataCell;
accel = data.accelDataCell;
cam2IMU = data.cam2IMU;Especifique las características intrínsecas de la cámara, los parámetros IMU y utilícelos para crear un objeto SLAM visual-inercial RGB-D.
% Camera intrinsic and IMU parameters can be found in the downloaded % sensors.yaml file intrinsics = cameraIntrinsics([6.1145098876953125e+02, 6.1148571777343750e+02],... [4.3320397949218750e+02, 2.4947302246093750e+02], [480, 848]); imuParams = factorIMUParameters(AccelerometerBiasNoise=2.499999936844688e-05*eye(3),... AccelerometerNoise=0.00026780980988405645*eye(3),... GyroscopeNoise=1.0296060281689279e-05*eye(3),... GyroscopeBiasNoise=2.499999993688107e-07*eye(3),... SampleRate=250); depthScaleFactor = 1000; vslam = rgbdvslam(intrinsics, depthScaleFactor, imuParams, SkipMaxFrames=10,... CameraToIMUTransform=cam2IMU, TrackFeatureRange = [30, 150], DepthRange= [0.1, 6.5], ... NumPosesThreshold=20, MaxNumPoints=1.2e3);
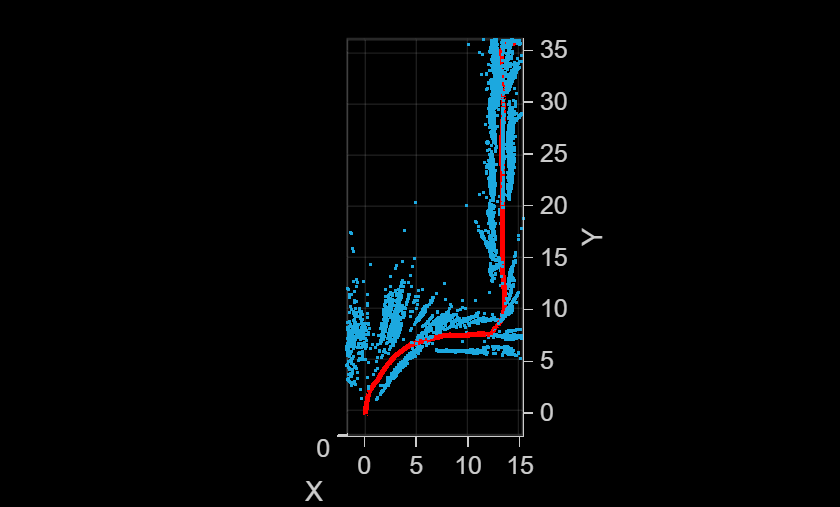
Procesar datos de imágenes y datos IMU y visualizar las poses de la cámara y los puntos del mapa 3D.
for i = 1:numel(imdsColor.Files) colorImage = readimage(imdsColor,i); depthImage = readimage(imdsDepth,i); addFrame(vslam, colorImage, depthImage, gyro{i}, accel{i}); if hasNewKeyFrame(vslam) plot(vslam); end end
Una vez procesados todos los fotogramas, reinicie el sistema.
while ~isDone(vslam) if hasNewKeyFrame(vslam) ax = plot(vslam); end end view(ax, 0, 90)
reset(vslam);
Referencias
[1] Mur-Artal, Raul, J. M. M. Montiel, and Juan D. Tardos. “ORB-SLAM: A Versatile and Accurate Monocular SLAM System.” IEEE Transactions on Robotics 31, no. 5 (October 2015): 1147–63. https://doi.org/10.1109/TRO.2015.2463671.
Capacidades ampliadas
Historial de versiones
Introducido en R2025aConsulte también
Objetos
monovslam|factorGraph|factorIMUParameters|cameraIntrinsics(Computer Vision Toolbox) |imageDatastore
Funciones
detectORBFeatures(Computer Vision Toolbox)
Temas
- Implement Visual SLAM in MATLAB (Computer Vision Toolbox)
- Visual SLAM with RGB-D Camera (Computer Vision Toolbox)
- Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink (ROS Toolbox)
- Monocular Visual Simultaneous Localization and Mapping (Computer Vision Toolbox)
- Monocular Visual-Inertial SLAM (Computer Vision Toolbox)