Aplicación
Los mapas de ocupación se utilizan para representar obstáculos en un entorno y definir los límites de su mundo. Puede crear mapas y actualizar ubicaciones de obstáculos a partir de lecturas de sensores mediante raycasting. Sincroniza con mapas existentes y mueve marcos locales para crear mapas egocéntricos que siguen el vehículo. Los mapas admiten valores binarios y probabilísticos para mapas 2D y una representación probabilística para mapas 3D.
Utilice estos mapas junto con Planificación de movimiento para planificar rutas en un mapa, o utilice los algoritmos para estimar la pose de un vehículo en un entorno.
Funciones
Temas
- Cuadrículas de ocupación
Detalles de la funcionalidad de cuadrícula de ocupación y la estructura de mapa.
- Fusione varios sensores Lidar utilizando capas de mapas
Los mapas de ocupación ofrecen una forma simple pero sólida de representar un entorno para aplicaciones robóticas al mapear el espacio-mundo continuo en una estructura de datos discreta.
- Cree un mapa de ocupación a partir de imágenes de profundidad utilizando odometría visual y un gráfico de pose optimizado
Este ejemplo muestra cómo reducir la desviación en la trayectoria estimada (ubicación y orientación) de una cámara monocular mediante la optimización del gráfico de pose 3D.
Ejemplos destacados
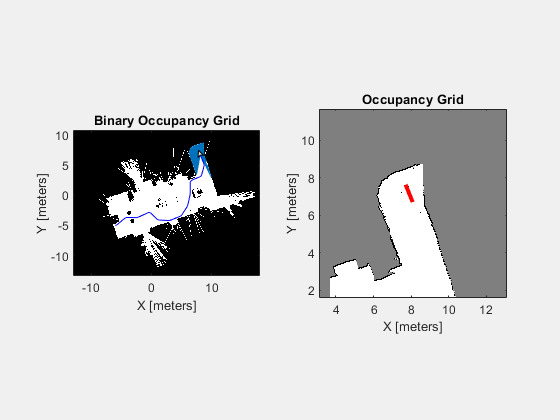
Cree mapas de ocupación egocéntricos utilizando sensores de distancia
Los mapas de ocupación ofrecen una forma simple pero sólida de representar un entorno para aplicaciones robóticas al mapear el espacio mundial continuo en una estructura de datos discreta. Las celdas de cuadrícula individuales pueden contener información binaria o probabilística, donde 0 indica espacio libre y 1 indica espacio ocupado. Puede acumular esta información a lo largo del tiempo utilizando mediciones de sensores y almacenarlas de manera eficiente en el mapa. Esta información también es útil para flujos de trabajo más avanzados, como la detección de colisiones y la planificación de rutas.
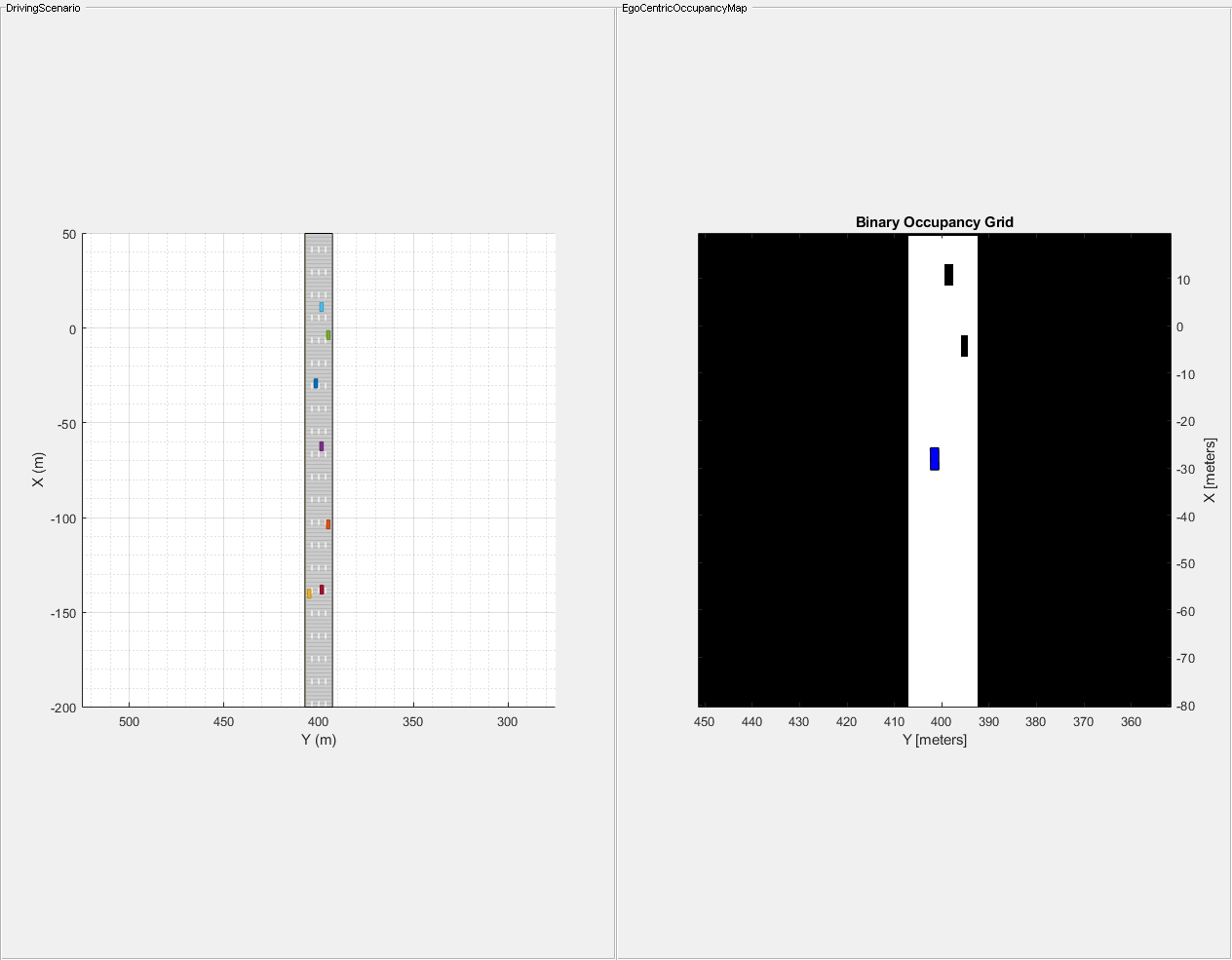
Cree un mapa de ocupación egocéntrico desde el Diseñador de escenarios de conducción
Este ejemplo muestra cómo crear un mapa de ocupación egocéntrica desde la appDriving Scenario Designer. Este ejemplo utiliza información de obstáculos del generador de detección de visión para actualizar el mapa de ocupación egocéntrico.
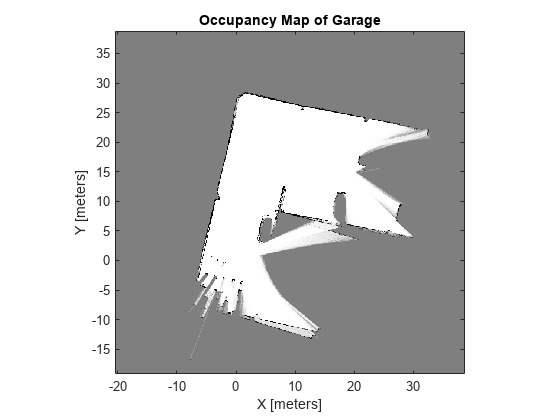
Cree un mapa de ocupación a partir de poses y escaneos Lidar
La función buildMap toma lecturas de escaneo LiDAR y poses asociadas para construir una cuadrícula de ocupación como objetos lidarScan y poses [x y theta] asociadas para construir una occupancyMap.