Planificación de movimiento
Utilice la planificación de movimiento para planificar una ruta a través de un entorno. Puede utilizar planificadores comunes basados en muestreo como RRT, RRT* e Hybrid A*, planificadores basados en Deep Learning o especificar sus propias interfaces de planificación de rutas personalizables. Utilice métricas de ruta, muestreo de espacio de estados y validación de estado para garantizar que su ruta sea válida y tenga una distancia adecuada de obstáculos o suavidad. Siga su ruta y evite obstáculos utilizando algoritmos de pure pursuit, histograma de campo vectorial (VFH) y banda elástica temporizada (TEB).
Funciones
Bloques
| Pure Pursuit | Comandos de control de velocidad lineal y angular |
| Timed Elastic Band | Planificar la ruta para evitar obstáculos y generar trayectorias óptimas en el tiempo (Desde R2025a) |
| Vector Field Histogram | Evite obstáculos usando el histograma de campo vectorial |
Temas
- Comience con las redes de planificación de movimiento
Redes de planificación de movimiento para muestreo de espacio de estados y planificación de trayectorias.
- Elija algoritmos de planificación de rutas para la navegación
Detalles sobre los beneficios de los diferentes algoritmos de planificación de trayectoria y movimiento.
- Generación de trayectoria óptima para la conducción urbana
Este ejemplo muestra cómo realizar una replanificación dinámica en un escenario urbano utilizando
trajectoryOptimalFrenet. - Planificación de movimiento en entornos urbanos utilizando un mapa de cuadrícula de ocupación dinámica
Este ejemplo le muestra cómo realizar una replanificación dinámica en una escena de conducción urbana utilizando una ruta de referencia de Frenet.
- Seguimiento de caminos con evasión de obstáculos en Simulink
Utilice Simulink ® para evitar obstáculos mientras sigue la ruta de un robot con accionamiento diferencial.
- Evasión de obstáculos con TurtleBot y VFH
Este ejemplo muestra cómo utilizar ROS Toolbox y un TurtleBot® con histogramas de campo vectorial (VFH) para evadir obstáculos al conducir un robot en un entorno.
- Histograma de campo vectorial
Detalles del algoritmo VFH y propiedades ajustables.
- Controlador de Pure Pursuit
Funcionalidad del controlador de Pure Pursuit y detalles del algoritmo.
- Follow Waypoints in Simulink Using Pure Pursuit Block
Guide a car-like vehicle along a series of waypoints in Simulink using the Pure Pursuit block.
Ejemplos destacados

Planifique rutas de robots móviles utilizando RRT
Este ejemplo muestra cómo utilizar el algoritmo de árbol aleatorio de exploración rápida (RRT) para planificar una ruta para un vehículo a través de un mapa conocido. También se aplican restricciones de vehículos especiales con un espacio de estado personalizado. Puede ajustar su propio planificador con espacios de estado personalizados y objetos de validación de ruta para cualquier aplicación de navegación.
Replanificación dinámica en un mapa interior
Este ejemplo muestra cómo realizar una replanificación dinámica en un mapa de almacén con un telémetro y un planificador de ruta A*.
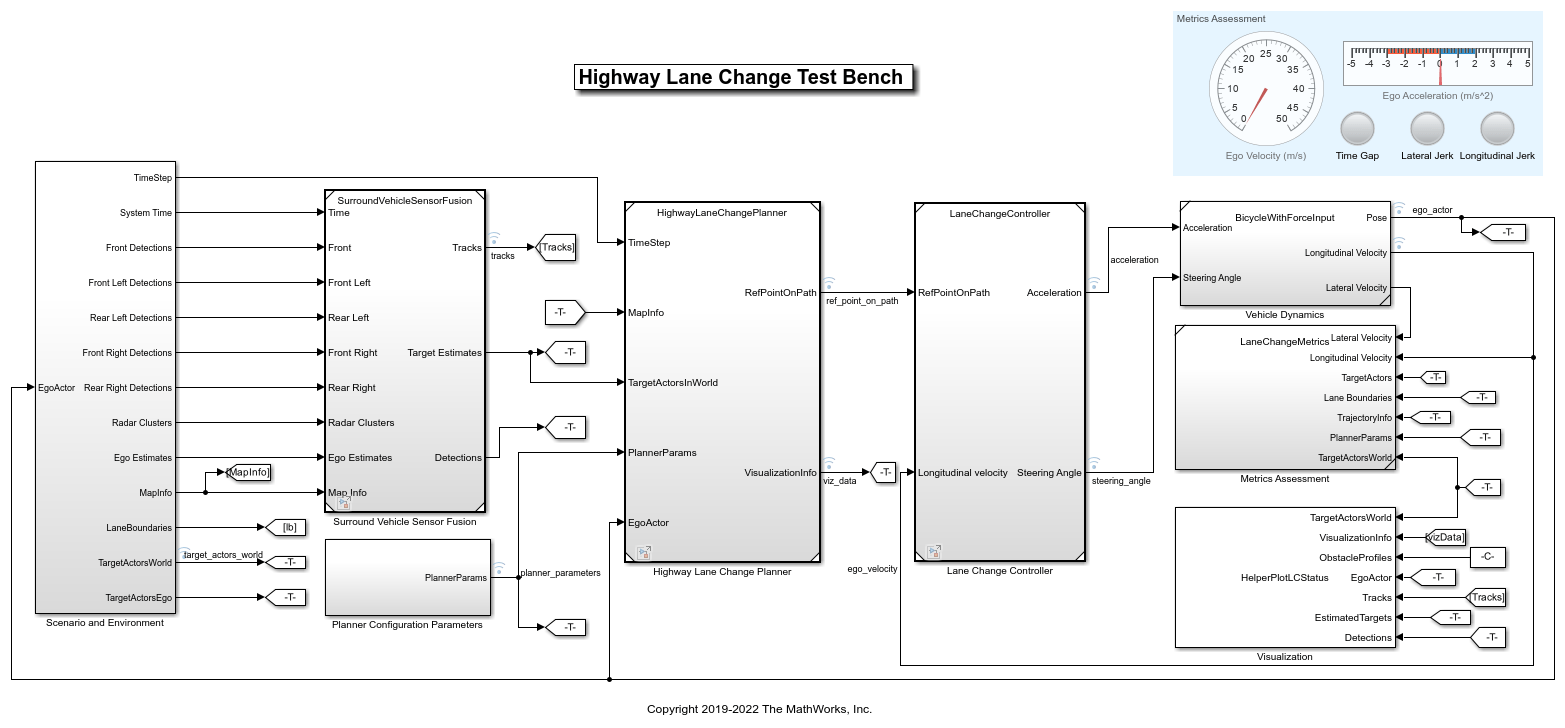
Cambio de carril en la autopista
Este ejemplo muestra cómo percibir la información de la vista envolvente y utilizarla para diseñar un sistema de maniobra de cambio de carril automatizado para escenarios de conducción en carretera.

Motion Planning with RRT for Fixed-Wing UAV
Plan the 3D motion of a fixed-wing UAV using the rapidly exploring random tree (RRT) algorithm, given a start and goal pose.
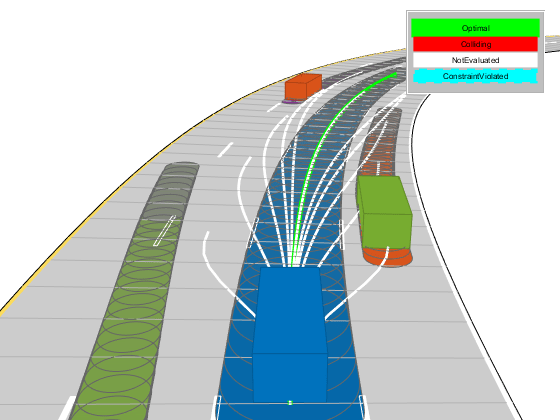
Planificación de la trayectoria de la carretera mediante la ruta de referencia de Frenet
Este ejemplo demuestra cómo planificar una trayectoria local en un escenario de conducción en carretera. Este ejemplo utiliza una ruta de referencia y una lista dinámica de obstáculos para generar trayectorias alternativas para un vehículo ego. El vehículo ego navega a través del tráfico definido en un escenario de conducción proporcionado desde un objeto drivingScenario. El vehículo alterna entre control de crucero adaptativo, cambio de carril y maniobras de seguimiento del vehículo según el coste, la viabilidad y el movimiento sin colisiones.
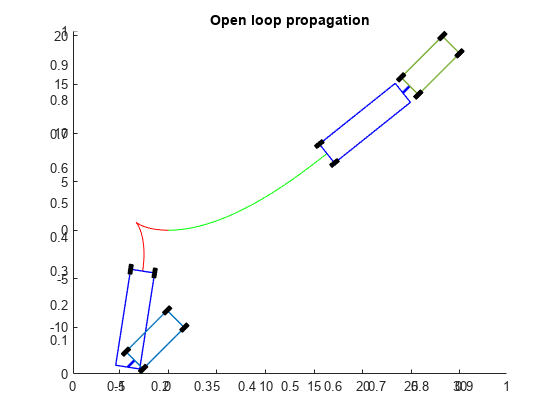
Planificación de movimiento con capacidad inversa para modelo de tractor-remolque mediante planificadorControlRRT
Este ejemplo muestra cómo encontrar soluciones de planificación de rutas globales para sistemas con cinemática compleja utilizando el planificador basado en cinemática, plannerControlRRT. El ejemplo está organizado en tres secciones principales:
Seguimiento de objetos y planificación de movimiento mediante la ruta de referencia de Frenet
Este ejemplo le muestra cómo replanificar dinámicamente el movimiento de un vehículo autónomo en función de la estimación del entorno circundante. Se utiliza una ruta de referencia de Frenet y un rastreador de asociación de datos probabilísticos conjuntos (JPDA) para estimar y predecir el movimiento de otros vehículos en la carretera. En comparación con el ejemplo Planificación de la trayectoria de la carretera mediante la ruta de referencia de Frenet, en este ejemplo se utilizan estas trayectorias estimadas del rastreador de múltiples objetos en lugar de la ground-truth para la planificación del movimiento.

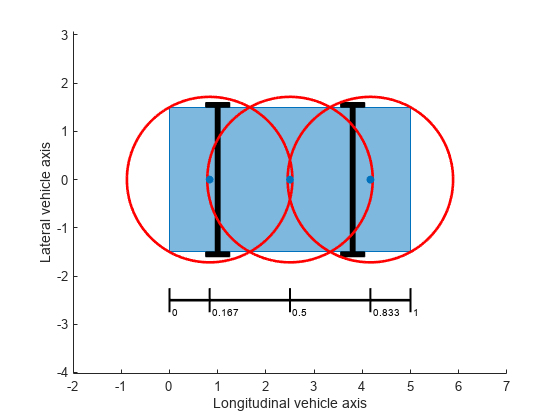
Suavizado de ruta basado en optimización para vehículos autónomos
Este ejemplo le muestra cómo optimizar la trayectoria de un robot similar a un automóvil manteniendo una curvatura suave y una distancia segura de los obstáculos en un estacionamiento.

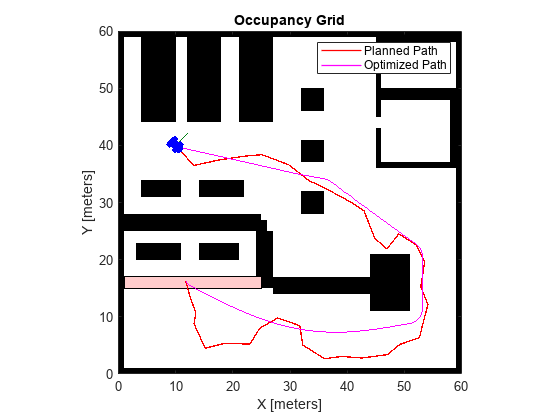
Planificadores de rutas de referencia para robots de accionamiento diferencial en el mapa del almacén
Este ejemplo muestra cómo elegir el mejor planificador de rutas 2-D para un robot de accionamiento diferencial en un entorno de almacén entre los planificadores de rutas disponibles. Utilice el objeto plannerBenchmark para comparar los planificadores de rutas plannerRRT, plannerRRTStar, plannerBiRRT, plannerPRM y plannerHybridAstar en el entorno del almacén con las posiciones de inicio y destino elegidas aleatoriamente. Compare los planificadores de rutas en función de su capacidad para encontrar una ruta válida, la distancia a los obstáculos, el tiempo necesario para inicializar un planificador, el tiempo necesario para encontrar una ruta, la longitud de la ruta y la suavidad de la ruta. Se elige un planificador adecuado en función del desempeño de cada planificador de ruta en las métricas mencionadas anteriormente.

Planificación todoterreno con modelos de elevación digitales
Este ejemplo muestra cómo procesar y almacenar información 2.5-D y presenta varias técnicas para usarla en un planificador de rutas todoterreno.
Habilite la verificación de colisiones de vehículos para la planificación de rutas utilizando el híbrido A*
Este ejemplo muestra cómo utilizar un planificador híbrido A* para planificar una ruta hacia un espacio de estacionamiento estrecho, teniendo en cuenta la forma de un robot similar a un automóvil.
Planificar la ruta hacia la región objetivo personalizada para Mobile Robot
Este ejemplo muestra cómo planificar una ruta para un robot móvil hacia una región objetivo utilizando un planificador de rutas de árbol aleatorio (RRT) de exploración rápida. En este ejemplo, puede definir una región objetivo personalizada como un polígono 2D y luego planificar una ruta hacia ella.
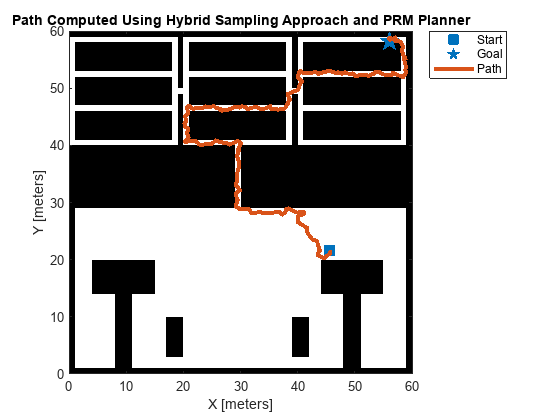
Método de muestreo híbrido para planificación de movimiento en entornos de almacén
Este ejemplo muestra cómo combinar los enfoques de muestreo uniforme y gaussiano para la planificación del movimiento en pasajes estrechos y espacios amplios.
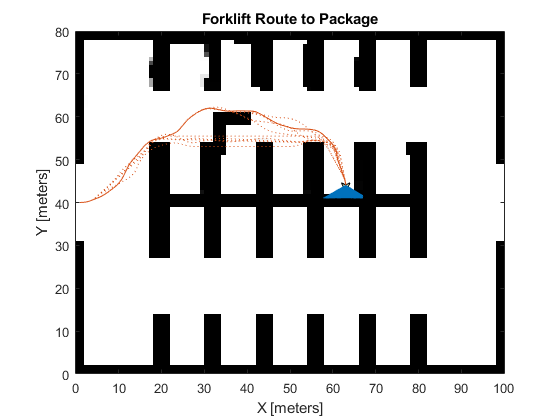
Planificación de la ruta en un escenario de almacén con evasión de obstáculos ocultos
Planifique la ruta en un escenario de almacén evitando obstáculos invisibles utilizando el algoritmo TEB.
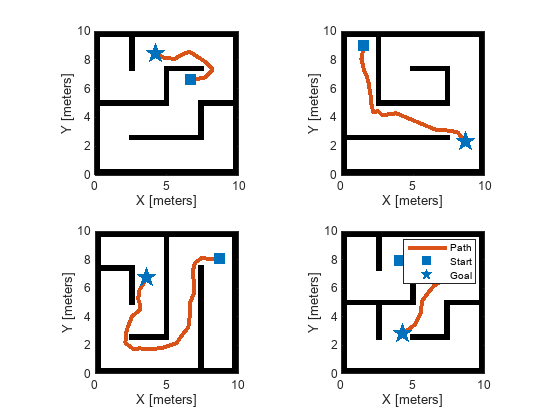
Entrene un muestreador basado en aprendizaje profundo para la planificación del movimiento
Este ejemplo muestra cómo crear un muestreador basado en aprendizaje profundo utilizando Motion Planning Networks para acelerar la planificación de rutas utilizando planificadores basados en muestreo como RRT (árbol aleatorio de exploración rápida) y RRT*. Para obtener información sobre las redes de planificación de movimiento (MPNet) para el muestreo del espacio de estados, consulte Comience con las redes de planificación de movimiento.
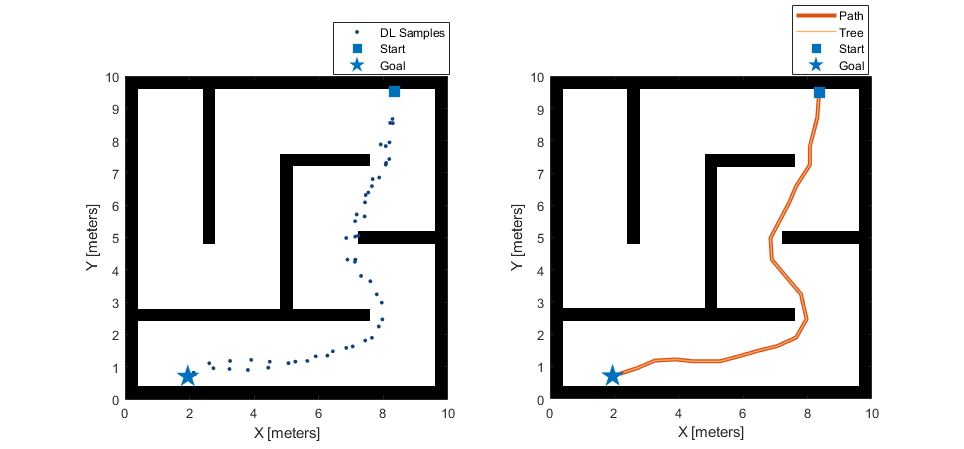
Acelere la planificación del movimiento con un muestreador basado en aprendizaje profundo
El ejemplo muestra cómo utilizar planificadores basados en muestreo como RRT (árbol aleatorio de exploración rápida) y RRT* con Motion Planning Networks (MPNet), un muestreador basado en aprendizaje profundo para encontrar rutas óptimas de manera eficiente.
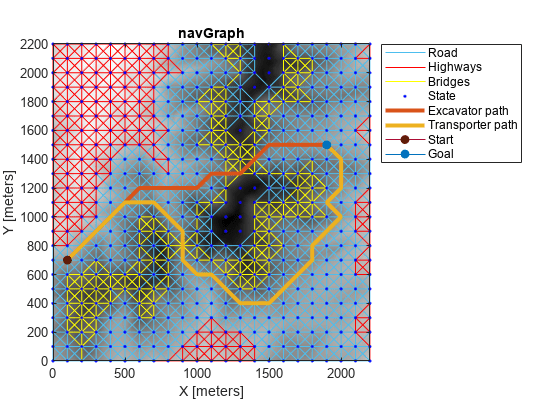
Planificación de rutas en terreno irregular según los requisitos del vehículo
Este ejemplo muestra cómo utilizar navGraph y plannerAStar para encontrar una ruta a través de un terreno accidentado teniendo en cuenta los requisitos y las limitaciones basados en el vehículo.
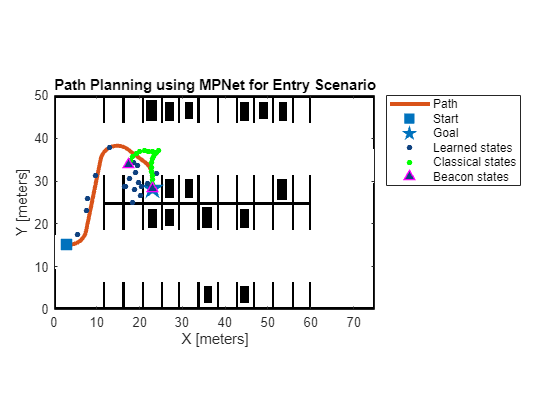
Planificación de rutas mediante MPNet para sistemas automatizados de valet parking
Realizar la planificación de rutas para un sistema de estacionamiento autónomo utilizando un MPNet previamente entrenado.

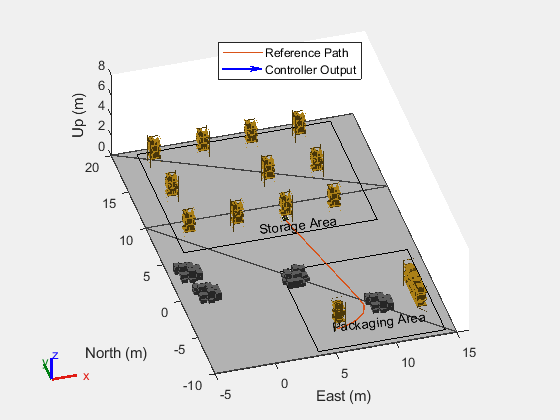
Simular el seguimiento de trayectoria en la plataforma objetivo en tiempo real Speedgoat
Realice una simulación en tiempo real del seguimiento de trayectoria en la plataforma objetivo en tiempo real de Speedgoat.
Evite obstáculos utilizando el Planificador Local TEB en Simulink
Realizar el seguimiento de trayectoria utilizando el planificador local TEB en Simulink.