Esta página es para la versión anterior. La página correspondiente en inglés ha sido eliminada en la versión actual.
Diseño de algoritmos para robots móviles
Estos algoritmos de Robotics System Toolbox™ se centran en aplicaciones robóticas móviles o en aplicaciones de vehículos terrestres. Este tipo de algoritmos proporcionan asistencia a lo largo de todo el flujo de trabajo de robótica móvil, desde la aplicación a la planificación y el control. Puede crear mapas de entornos con cuadrículas de ocupación, desarrollar algoritmos de planificación de rutas para robots en un determinado entorno, y ajustar controladores para seguir un conjunto de waypoints. Realice una estimación de estados en base a los datos del sensor de LIDAR desde el robot.
Funciones
Bloques
| Ackermann Kinematic Model | Movimiento del vehículo similar a un automóvil utilizando el modelo cinemático de Ackermann (desde R2019b) |
| Bicycle Kinematic Model | Calcule el movimiento de un vehículo similar a un automóvil utilizando el modelo cinemático de una bicicleta (desde R2019b) |
| Differential Drive Kinematic Model | Calcula el movimiento del vehículo utilizando el modelo cinemático con tracción diferencial (desde R2019b) |
| Unicycle Kinematic Model | Calcular el movimiento de un vehículo usando el modelo cinemático de un monociclo (desde R2019b) |
| Pure Pursuit | Comandos de control de velocidad lineal y angular (desde R2019b) |
Temas
Aplicación y planificación de rutas
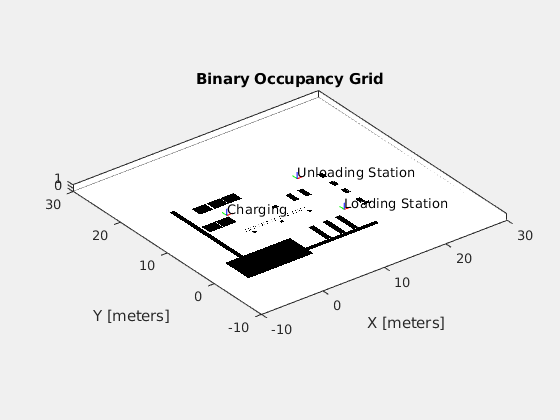
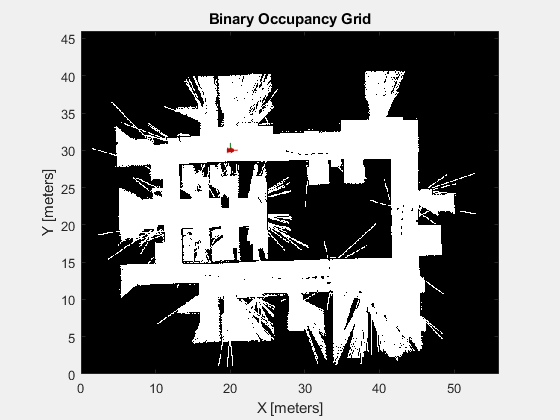
- Cuadrículas de ocupación
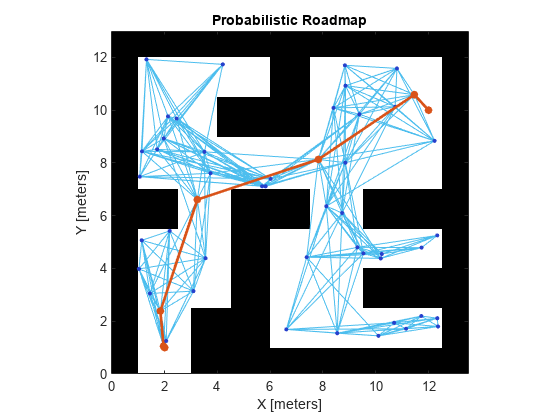
Detalles de la funcionalidad de cuadrícula de ocupación y la estructura de mapa. - Hojas de ruta probabilísticas (PRM)
Funcionamiento del algoritmo PRM y parámetros de ajuste específicos. - Planificación de rutas en entornos de diferente complejidad
Este ejemplo muestra cómo calcular una ruta libre de obstáculos entre dos ubicaciones en un determinado mapa utilizando el planificador de rutas PRM (hoja de rutas probabilísticas). - Crear mapas con poses conocidas
En este ejemplo se muestra cómo crear un mapa de un entorno mediante lecturas del sensor de distancia y poses del robot para un robot de tracción diferencial. - Planificar una ruta para un robot de tracción diferencial en Simulink
Este ejemplo muestra cómo ejecutar una ruta libre de obstáculos entre dos ubicaciones de un determinado mapa en Simulink®.
Modelado de movimientos
- Ecuaciones de cinemática para robots móviles
Obtenga información sobre las ecuaciones de cinemática para robots móviles, incluidos los modelos de monociclo, bicicleta, tracción diferencial y Ackermann. - Simular diferentes modelos cinemáticos para robots móviles
Este ejemplo muestra cómo modelar diferentes modelos cinemáticos de robot en un entorno y compararlos.
Control de robots
- Controlador de Pure Pursuit
Funcionalidad del controlador de Pure Pursuit y detalles del algoritmo. - Seguimiento de rutas para un robot de tracción diferencial
Este ejemplo muestra cómo controlar un robot para que siga la ruta deseada utilizando un simulador de robot. - Controlar el robot con tracción diferencial en Gazebo con Simulink
En este ejemplo se muestra cómo controlar un robot con tracción diferencial en la cosimulación con Gazebo mediante Simulink.
Estimación de estados
- Particle Filter Parameters
To use thestateEstimatorPFparticle filter, you must specify parameters such as the number of particles, the initial particle location, and the state estimation method. - Particle Filter Workflow
A particle filter is a recursive, Bayesian state estimator that uses discrete particles to approximate the posterior distribution of the estimated state. - Track a Car-Like Robot Using Particle Filter
Particle filter is a sampling-based recursive Bayesian estimation algorithm, which is implemented in thestateEstimatorPFobject.
Ejemplos destacados




You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)