Los equipos de trabajo interdisciplinarios pueden utilizar MATLAB y Simulink como un entorno de integración común a lo largo del flujo de trabajo completo de los vehículos submarinos autónomos. Desde la ingeniería de sistemas hasta el modelado de la plataforma, la simulación del entorno y el diseño de algoritmos de autonomía, el diseño basado en modelos ayuda a reducir el riesgo y generar confianza en el rendimiento del sistema con suficiente antelación a las pruebas de mar.

Uso de MATLAB para AUV


Realice análisis de tradeoff y desarrolle arquitecturas que relacionen los requisitos con los modelos de Simulink
Puede utilizar MATLAB y Simulink para crear un verdadero hilo digital que conecte los requisitos con la arquitectura del sistema, e incluso con la implementación y la generación de código. Esto permite realizar análisis de tradeoff con modelos dinámicos (como sistemas electromecánicos y hélices), evaluar el modelado de sistemas de comunicación de alto nivel para planificar misiones, y modelar el sistema de energía para evaluarlo, dadas las restricciones de energía como la carga máxima o la capacidad de la batería. Con middleware como DDS y ROS, los componentes y las aplicaciones pueden compartir información y funcionar juntos a medida que el diseño evoluciona.


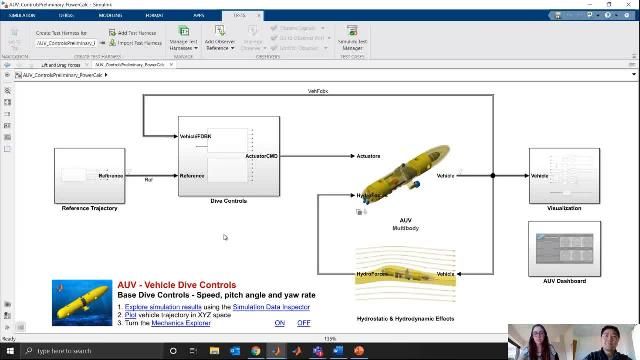
Modele y visualice comportamientos dinámicos 3D y electromecánicos complejos
Puede utilizar MATLAB y Simulink para crear modelos multidominio de plataformas submarinas potentes y eficientes. El modelado físico con Simscape y Simscape Multibody permite integrar hidrodinámica, efectos de fluidos, comportamientos dinámicos y efectos inerciales a partir de modelos CAD. Simscape Electrical permite crear modelos de sistemas de energía con componentes electrónicos y mecatrónicos como baterías y propulsores. Con un modelo de planta electromecánica realista, puede simular fallos de los componentes y evaluar el rendimiento en el nivel del sistema. Con Simulink, puede cerrar el bucle conectando los modelos de planta a entornos cuboides de baja resolución o a mundos fotorrealistas en Unreal Engine para simular el comportamiento de los sensores, validar los algoritmos de percepción y presentar los resultados.
Aproveche los modelos para detectar, percibir y planificar misiones
MATLAB y Simulink ofrecen herramientas para desarrollar algoritmos y optimizar el rendimiento del sistema. Puede utilizar modelos de sensores, como sonar, arrays en fase y unidades de medida inerciales (IMU), para prototipar la forma en que el sistema detecta un entorno y realizar fusión, localización, mapeo y seguimiento de sensores. MATLAB y Simulink permiten aumentar el nivel de autonomía de un vehículo con prestaciones de Machine Learning y Deep Learning. Además, Communications Toolbox y Phased Array System Toolbox pueden ayudar en el análisis de modelos de propagación de señales y atenuación para la planificación de misiones o el rendimiento de las comunicaciones.

Diseñe y optimice controladores para diversos grados de libertad y restricciones
Puede utilizar MATLAB y Simulink para diseñar, iterar y optimizar controladores de planificación de movimiento y seguimiento de trayectoria para vehículos marítimos. También puede simular el movimiento del vehículo en 2D y 3D. En la simulación 3D, puede modelar y observar los efectos del acoplamiento del movimiento de vehículos marítimos en diferentes ejes. Mientras simula el movimiento, puede supervisar parámetros como el consumo de energía y el radio de giro, así como optimizar el planificador de movimiento con determinados criterios. Puede desplegar controladores de movimiento diseñados en MATLAB y Simulink directamente en hardware embebido, como microcontroladores y FPGA.
Desarrolle y pruebe algoritmos de autonomía
Puede utilizar MATLAB y Simulink para modelar la lógica del sistema y evaluar los algoritmos y planificadores de movimiento. Los ejemplos de planificación de movimiento, localización y mapeo le ayudan a dar los primeros pasos con soluciones personalizadas y le proporcionan puntos de referencia para realizar pruebas. Puede explorar los tradeoffs de diseño entre los diferentes sensores con parámetros ajustables como rango, resolución, ruido y energía. También puede diseñar planificadores de trayectorias que tengan en cuenta dinámica de vehículos de alta fidelidad o de nivel de sistema, como el ángulo de balanceo y el radio de giro mínimo. Stateflow permite diseñar y desarrollar sistemas de control de supervisión, planificación de tareas y gestión de fallos.



Consulte precios
Reciba un presupuesto de productos y servicios ajustado a sus necesidades.

¿Desea una consulta?
¿En qué podemos ayudar?